- En la Universidad de California en San Diego, los investigadores han creado “botas” flexibles de robot hechas de látex y café molido.
- Estas botas utilizan el concepto de “bloqueo granular” para ayudar a los robots a moverse hasta un 40 por ciento más rápido.
- Las aplicaciones de búsqueda y rescate podrían beneficiarse enormemente de los robots que pueden atravesar áreas que los humanos no deberían o no pueden ir.
Los humanos dan mucho por sentado, y la forma en que caminamos no es una excepción. Se necesita la coordinación de más de 600 músculos para ayudarnos a atravesar un camino cubierto de rocas o una colina cubierta de raíces de árboles. Pero para un robot, caminar sobre superficies implacables, ya sea una costa arenosa o un terreno marciano rocoso, es una tarea hercúlea.
Pero los investigadores de la Universidad de California en San Diego descubrieron que los robots realmente pueden ponerlo en marcha si los equipa con un conjunto de botas. Utilizando látex y café molido, el equipo ha desarrollado pies flexibles que permiten que un robot se mueva hasta un 40 por ciento más rápido en superficies rugosas, incluidas astillas de madera, guijarros y, con suerte, futuras superficies extraterrestres.
“Los robots deben ser capaces de caminar de manera rápida y eficiente en terrenos irregulares y naturales para poder ir a donde sea que los humanos puedan ir, pero tal vez no deberían hacerlo”, Emily Lathrop, investigadora principal del proyecto y doctora en ingeniería. estudiante en UC San Diego, dijo en un comunicado. Ella y sus co-investigadores presentarán su próximo trabajo en la conferencia RoboSoft, que tendrá lugar virtualmente entre el 15 de mayo y el 15 de julio.
Para crear las botas, Lathrop y compañía recurrieron a la naturaleza en busca de inspiración. Después de diseñar las esferas flexibles con una membrana de látex, el equipo las llenó con posos de café y pequeñas estructuras que recuerdan las raíces de las plantas. El énfasis en el relleno es realmente clave: debido a un concepto de física conocido como “bloqueo granular”, el café molido puede moverse de un lado a otro, comportándose como un sólido y un líquido.
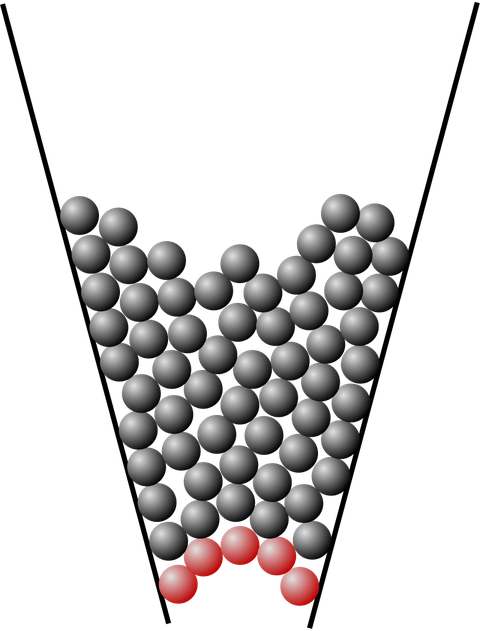
El atasco ocurre cuando aumenta la densidad de las partículas, lo que impide que fluyan. Como resultado, el material actúa como un sólido hasta que se desatasca. En este gráfico, la formación de arco de partículas (en rojo) atasca las otras partículas. Otro ejemplo de este fenómeno es el esfuerzo cortante, que explica en parte por qué las llantas de su automóvil se sienten sólidas, cuando en realidad están llenas de aire.
Entonces, cuando el pie del robot se encuentra con el suelo, la bota puede reafirmarse y coincidir con la forma del suelo debajo. A medida que el robot levanta su pie, la bota se desatasca antes de su próximo contacto con el suelo. Mientras tanto, esas estructuras en forma de raíz ayudan a mantener las botas rígidas mientras están atascadas.
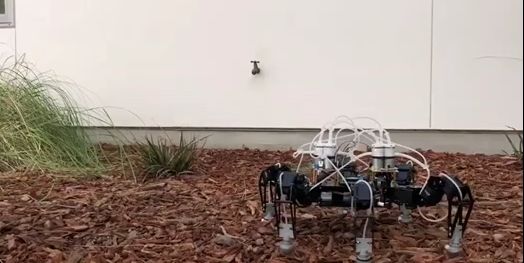
Para las pruebas, el equipo de UC San Diego recurrió a un robot hexapod disponible en el mercado. Luego, construyeron un sistema a bordo para generar presión negativa y positiva para ayudar a controlar la interferencia. Este sistema funciona como una aspiradora que aspira aire del café molido para endurecer y aflojar el pie.
Este contenido se importa de YouTube. Puede encontrar el mismo contenido en otro formato, o puede encontrar más información en su sitio web.
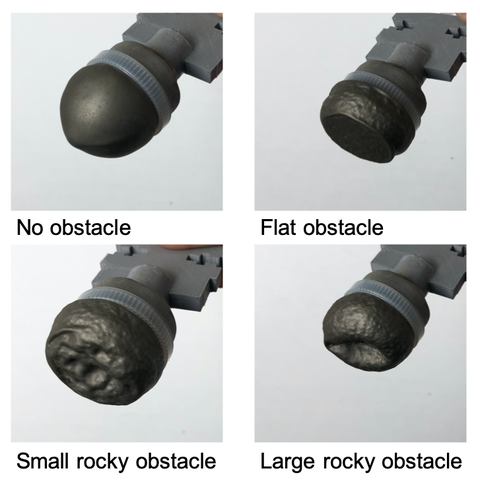
Probaron las botas en terreno plano, astillas de madera y guijarros, y en un cuarto escenario no usaron botas para servir como control. Resulta que con el atasco pasivo, usando solo el peso de las piernas del robot y sin vacío para aspirar el aire, las botas funcionaron mejor en terreno plano. Sin embargo, con la intervención de bloqueo activo, las botas funcionaron mejor en rocas sueltas. En ambos casos, los revestimientos ayudaron al robot a agarrar mejor el suelo, lo que condujo a una locomoción más rápida y representa una mejora de velocidad de aproximadamente el 40 por ciento.
“El mundo natural está lleno de terrenos desafiantes para los robots que caminan: sustratos resbaladizos, rocosos y blandos hacen que caminar sea complicado”, dijo Nick Gravish, profesor del Departamento de Ingeniería Mecánica y Aeroespacial de UC San Diego y coautor del estudio. la declaración. “Los pies que pueden adaptarse a estos diferentes tipos de terreno pueden ayudar a los robots a mejorar la movilidad”.
Su próximo desafío será incorporar sensores en la parte inferior de los pies para que un tablero de control electrónico pueda ayudar a identificar el tipo de suelo sobre el que está a punto de pisar el robot. De esa manera, pueden mejorar los algoritmos de control que cambian entre interferencia activa y pasada.
Esta no es la primera vez que los robotistas recurren al bloqueo granular para realizar mejoras en las extremidades robóticas. En 2012, los investigadores de Cornell mostraron cómo el café molido y los globos de fiesta podían ser pinzas perfectas para ayudar a los robots a recoger artículos de forma irregular.
Café molido y robots, ¿quién sabe?
Este contenido es creado y mantenido por un tercero, e importado a esta página para ayudar a los usuarios a proporcionar sus direcciones de correo electrónico. Puede encontrar más información sobre esto y contenido similar en piano.io
Esta sección de comentarios es creada y mantenida por un tercero, y se importa a esta página. Es posible que pueda encontrar más información en su sitio web.