Nvidia ha lanzado una nueva plataforma de mapeo que proporcionará a la industria de vehículos autónomos una cobertura de mapeo real en tierra de más de 300,000 millas de carreteras en América del Norte, Europa y Asia para 2024, dijo el fundador y CEO Jensen Huang en el evento GTC de la compañía el martes.
La plataforma, denominada Drive Map, está orientada a permitir altos niveles de conducción autónoma. Drive Map no solo está abierto a los clientes existentes de Nvidia, sino que aumenta las soluciones existentes de la empresa para la industria AV.
En el mismo evento, la compañía anunció su próxima generación de Drive Hyperion, el kit de herramientas de autoconducción de cómputo y sensor de Nvidia que utilizan Mercedes, Volvo, JiDu y, a partir del martes, BYD y Lucid Motors, para brindar una variedad de conducción inteligente y funciones avanzadas de asistencia a la conducción.
Empresas audiovisuales como TuSimple, WeRide, Zoox y DeepRoute.ai también son clientes de Hyperion.
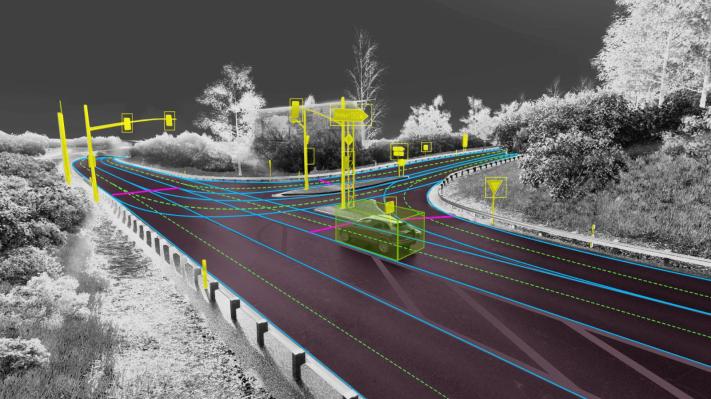
Drive Map representa los frutos de la adquisición por parte de Nvidia el año pasado de DeepMap, una startup de mapeo de alta definición. La herramienta proporciona una precisión de nivel centimétrico al combinar el mapeo de encuestas preciso de DeepMap con datos de mapeo anónimos que se han obtenido de todos los vehículos que usan la arquitectura Hyperion de Nvidia. La herramienta de mapeo presenta tres capas de localización (cámara, lidar y radar) para proporcionar la redundancia necesaria para la autonomía.
Todos los datos extraídos de los clientes de Nvidia se cargan constantemente en la nube mientras conducen los vehículos. Luego se agrega y se carga en Omniverse de Nvidia, la plataforma abierta de la compañía creada para la colaboración virtual y la simulación físicamente precisa en tiempo real, y se usa para actualizar el mapa para que los vehículos puedan lograr la localización adecuada. En el proceso, Nvidia puede escalar más rápidamente su huella de mapeo.
Además, Omniverse utiliza herramientas de generación de contenido automatizadas para crear un mapa detallado, que luego se convierte en un entorno de simulación manejable que se puede usar con Simulador de unidad Nvidiauna plataforma de simulación de extremo a extremo para vehículos autónomos.