

Un estudio recién publicado en la revista Nature revela un emocionante logro: un dron autónomo, operado por inteligencia artificial, ha superado por primera vez a los campeones de carreras de drones en una competición. Este avance marca un hito importante que podría tener un impacto en la optimización de sistemas utilizados en vehículos autónomos y robots industriales.
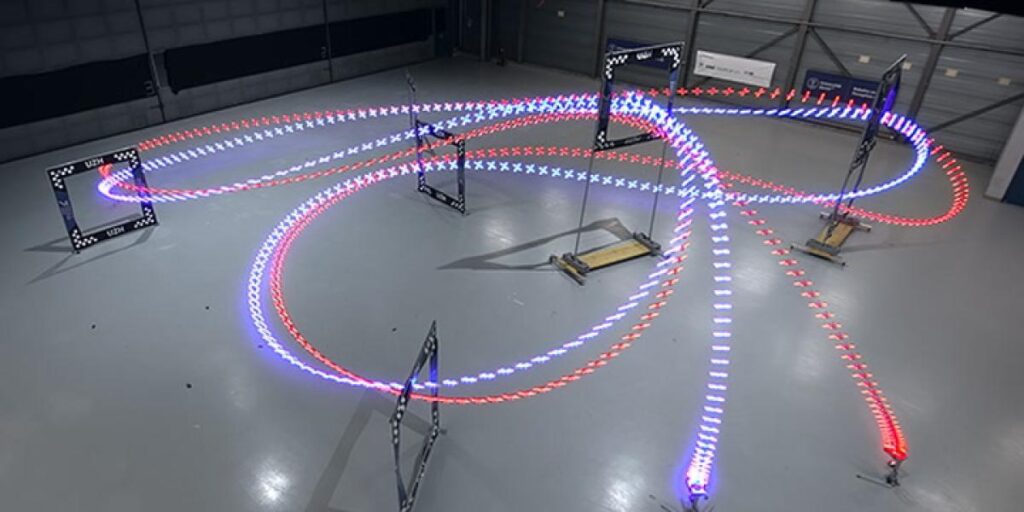
La competencia tuvo lugar en un circuito de 75 metros, compuesto por siete puertas que debían ser atravesadas en un orden específico. Los drones participantes alcanzan velocidades de hasta 100 km/h y logran aceleraciones que rivalizan con las de un automóvil de Fórmula 1.
El Grupo de Robótica y Percepción de la Universidad de Zúrich reclutó a tres campeones de carreras de drones para enfrentarse al dron autónomo. Estos pilotos llevaban cascos que transmitían las imágenes del dron que estaban controlando. A pesar de tener solo una semana para prepararse, incluido un ex campeón mundial de la liga de carreras de drones, el dron autónomo superó a la mayoría de ellos en las carreras y estableció la vuelta más rápida en el circuito.
Este logro marca la primera vez en la que “un robot autónomo móvil ha logrado un rendimiento a nivel de campeón mundial en un deporte competitivo en el mundo real”, según el estudio. Aunque algunos drones previamente habían alcanzado niveles “expertos”, solían depender de sistemas externos de captura de movimiento para optimizar su ruta, lo que se consideraba una ventaja desigual.
El equipo detrás del dron autónomo, llamado Swift, desarrolló un sistema completamente autónomo que se basa en sus propios sensores y capacidad de cálculo. Swift puede ajustar su curso en tiempo real al enviar hasta 100 nuevas instrucciones por segundo al dron. Elia Kaufmann, el primer autor del estudio y estudiante de doctorado en el momento de la investigación, explica que el secreto de Swift radica en una técnica conocida como “aprendizaje por refuerzo profundo” (“deep reinforcement learning”), que combina un extenso procesamiento de datos con la observación de reglas que recompensan los avances realizados por la máquina.