


Gitai S1 es un brazo robótico semiautónomo controlado desde tierra en la ISS que recientemente alcanzó el nivel 7 de un máximo de 9 en una rigurosa prueba de la NASA.
NASA informó que se ha alcanzado un hito importante para un nuevo brazo robótico que se está probando en la Estación Espacial Internacional. La ISS ya tiene brazos robóticos situados en el exterior, como Canadarm2, que ayuda en varias tareas importantes, y el brazo robótico del laboratorio Kibo que se utiliza específicamente para experimentos realizados en ese módulo. Este nuevo brazo está destinado a realizar manipulaciones de propósito general algo similares a las tareas que realizan los astronautas.
El Canadarm original se lanzó como un componente del transbordador espacial Columbia en 1981. Sirvió para maniobrar cargas útiles fuera de la bahía del transbordador. Esto estaba bajo el control de los astronautas dentro del transbordador. Después de 90 misiones, finalmente fue retirado y reemplazado por Canadarm2 en la ISS. Este brazo robótico mucho más avanzado se puede mover por el exterior de la Estación Espacial Internacional, de un extremo a otro, para ayudar a manipular objetos grandes mientras proporciona retroalimentación de fuerza al astronauta en los controles y utiliza la prevención automática de colisiones.
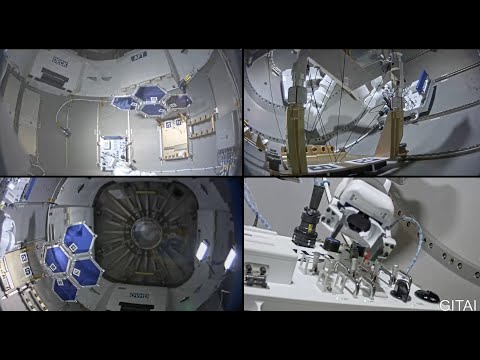
El brazo robótico más nuevo que llega a la Estación Espacial Internacional es el Gitai S1, un robot semiautónomo que puede operar dentro o fuera de una nave espacial. El brazo se sometió a pruebas en el nuevo Nanoracks Bishop Airlock, la primera incorporación comercial permanente a la ISS. El Gita S1 logró una calificación de Nivel de preparación tecnológica de 7 y el máximo es 9. Esto significa que el prototipo pasó una prueba simulada mientras estaba en el espacio. Para alcanzar TRL 8, un modelo de producción real debe completar las pruebas en el suelo o en el espacio. TRL 9 significa un uso exitoso en una misión real. El brazo utiliza una combinación de operación autónoma y guiada por un equipo de tierra para activar interruptores, pulsar botones e incluso ensamblar equipos tecnológicos, como paneles solares. El plan es que el brazo robótico maneje misiones que podrían ser peligrosas para los astronautas.
Robots para trabajar junto a astronautas


El plan de la NASA para brazos robóticos e incluso robots completos es trabajar junto a los astronautas, no reemplazarlos. Los brazos robóticos pueden servir para operar en condiciones peligrosas y para manipular objetos que no pueden ser manejados por un humano. Los paseos espaciales son intrínsecamente peligrosos y físicamente exigentes. Si el brazo robótico puede manejar el mantenimiento de rutina y otras tareas, eso hace la vida más fácil y segura para los astronautas. Gitai S1 está diseñado para manipular interruptores y objetos que un astronauta también podría usar. Si los astronautas fueran reemplazados, los interruptores serían electrónicos y no físicos.
En el futuro, los brazos robóticos como el S1 de Gitai y los dispositivos más grandes podrían ser fundamentales en el trabajo realizado en misiones distantes a la Luna o Marte, donde el robot puede preparar el camino para los viajeros humanos. Dado que el Gitai S1 puede manejar algunas tareas de forma autónoma y se puede controlar de forma remota, abre este control de larga distancia para varias misiones. Si bien se requerirán más pruebas antes de que este brazo robótico pueda usarse en misiones reales, este es un hito importante para que el Gitai S1 alcance el nivel de preparación tecnológica 7.
Fuente: Gitai, NASA