
Los mayordomos robóticos humanoides revolucionarían la realización de las tareas domésticas, pero las máquinas similares a las humanas son intrínsecamente difíciles de fabricar.
Más tareas están siendo realizadas por robotsSin embargo, los medios del siglo pasado retrataban a los ‘mayordomos’ robóticos domésticos de manera muy diferente a los actuales debido a las dificultades inherentes a la construcción de un robot humanoide. Una pregunta que se les hace a los especialistas en robótica es cuándo la robótica moderna se pondrá al día con esas representaciones, máquinas humanoides que se articulan y se mueven de manera similar a los humanos, y cuándo los robots capaces de realizar tareas domésticas y peligrosas podrían estar disponibles comercialmente. Una pregunta a veces tonta pero honesta, y en la que todavía se está trabajando.
El cuerpo humano es increíblemente versátil y los especialistas en robótica han estado tratando de replicarlo durante mucho tiempo. Las piernas y los pies que caminan pueden manejar terrenos que las ruedas y las pisadas que usan las máquinas no pueden, y la flexibilidad de las manos de tipo humano los convierte en los mejores manipuladores de objetos en todos los sentidos. Se han realizado varios intentos a lo largo de los años con diversos grados de éxito, pero los más comunes y exitosos de estos robots tienden a presentar garras simples o manos de agarre por fricción y tienen cuatro patas o caminan sobre dos patas de pájaro.
En última instancia, es la dificultad inherente de diseñar y programar piernas, pies, brazos y manos humanoides lo que hace que tales robots sean tan difíciles de crear, como se explica en República de silicio. Los sistemas biológicos de caminar sobre dos piernas y agarrar las manos son complejos y requieren varios sistemas para funcionar en sincronía precisa. El hecho de que la Tierra no tenga muchas especies bípedas o con manos debería pintar una imagen de cuán complejas son estas funciones, y replicarlas es difícil y costoso. La marcha bípeda requiere un acto de equilibrio constante entre los nervios y los músculos. Estar ‘inmóvil’ sobre dos pies es una tarea activa, con varios músculos en todas las piernas y los pies que se activan constantemente para reducir el balanceo mientras el equilibrio se ajusta constantemente. Muchos robots bípedos que caminan se caen porque el sistema no puede equilibrarse sin sistemas y programación similares para mantenerlo erguido.
Los pies y manos mecánicos son difíciles de construir
Es aún más difícil diseñar robots que caminan con pies humanoides, ya que el sistema tiene que tener en cuenta el ángulo en el que debe estar cada parte de la parte inferior flexible de cada pie para que el robot se adapte al terreno. Para que una máquina camine erguida sobre piernas humanoides sin caerse, necesitaría el mismo rango de flexibilidad en los mismos lugares en la totalidad de sus piernas y pies, y cada posición requiere articulaciones, motores y mecanismos de retroalimentación únicos, todos encajados en el mismo espacio, haciendo que el diseño físico sea increíblemente complicado. A menudo, las piezas disponibles para tales cosas son demasiado grandes o no encajan lo suficientemente bien como para valer esta complejidad adicional. La solución más común es hacer robots de cuatro patas con pies redondos, ya que tener tres de los pies en el suelo a la vez hace que sea más fácil mantener el equilibrio, y muy parecido a un taburete de cuatro patas, esto significa que la forma de los pies no no importa
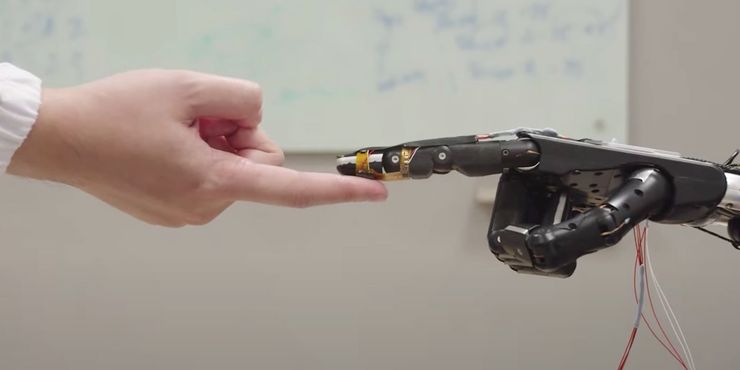
Aún más difíciles de diseñar son las manos de agarre, que requieren la misma flexibilidad, control y precisión que los pies y más. Los brazos robóticos y los dispositivos de agarre utilizados en muchos entornos industriales tienden a tener “manos” con pocos dedos que se parecen más a pinzas de cangrejo, vicios que se mueven entre posiciones fijas en lugar de usar varios dedos flexibles. Los robots no tienen inherentemente ningún mecanismo de retroalimentación para decirle al sistema qué tan fuerte está la máquina apretando algo, simplemente abren y cierran sus articulaciones una cantidad programada. Sin un mecanismo de retroalimentación que le diga al robot qué tan fuerte está apretando, las manos robóticas diseñadas para agarrar objetos pueden dañar las cosas al apretar demasiado fuerte o no lo suficiente. En cambio, las manos robóticas con forma de garra están programadas para abrir y cerrar sus pinzas en posiciones preprogramadas para sostener el mismo tipo de objeto una y otra vez. Con las articulaciones y la programación necesarias para replicar el rango de movimiento de los dedos multiarticulados más las palmas y las muñecas, las manos verdaderas son más complejas de diseñar que los pies.
A pesar del lento progreso, los especialistas en robótica están trabajando para superar y solucionar estas limitaciones en los robots. Se dedica mucho trabajo a equilibrar sistemas utilizando soluciones como giroscopios, y existen concursos para diseñar robots que puedan permanecer erguidos en terrenos variables. Grupos que incluyen ingenieros biomecánicos ayudan a diseñar nuevas manos, ya que esta tecnología puede hacer prótesis de manos. Los resultados, y tal vez algún día, robot mayordomos, llegará a tiempo.
Fuente: Silicon Republic