


Los desarrollos en el mundo de los autos que conducen a sí mismos a veces pueden ser un poco secos: un millón de millas sin un accidente, un aumento del 10 por ciento en el rango de detección de peatones, etc. Pero esta investigación tiene tanto una idea interesante como un método de prueba sorprendentemente práctico: enfrentar al vehículo contra un piloto de carreras real en un circuito.
Para establecer expectativas aquí, esto no es un truco, en realidad está justificado debido a la naturaleza de la investigación, y no es como si fueran posiciones comerciales, disputando líneas de entrada y, en general, frotando contra parachoques. Fueron por separado, y el investigador, a quien contacté, se negó cortésmente a proporcionar los tiempos de vuelta reales. Esto es ciencia, gente. ¡Por favor!
La pregunta que Nathan Spielberg y sus colegas de Stanford estaban interesados en responder tiene que ver con un vehículo autónomo que opera en condiciones extremas. El simple hecho es que una gran proporción de las millas recorridas por estos sistemas se encuentran a velocidades normales, en buenas condiciones. Y la mayoría de los encuentros de obstáculos son igualmente comunes.
Si sucediera lo peor y un automóvil necesita superar estos límites ordinarios de manejo, específicamente los límites de fricción, ¿se puede confiar en que lo haga? ¿Y cómo construirías un agente de inteligencia artificial que puede hazlo?
El artículo de los investigadores, publicado hoy en la revista Science Robotics, comienza con el supuesto de que un modelo basado en la física no es adecuado para el trabajo. Estos son modelos de computadora que simulan el movimiento del automóvil en términos de peso, velocidad, superficie de la carretera y otras condiciones. Pero son necesariamente simplificados y sus suposiciones son del tipo para producir resultados cada vez más inexactos a medida que los valores exceden los límites ordinarios.
Imagínese si un simulador de este tipo simplificara cada rueda hasta un punto o una línea cuando, durante una diapositiva, es muy importante qué lado del neumático está experimentando la mayor fricción. Dichas simulaciones detalladas están más allá de la capacidad del hardware actual de hacer lo suficientemente rápido o con precisión. Pero los resultados de tales simulaciones se pueden resumir en una entrada y una salida, y esos datos pueden alimentarse en una red neuronal, una que resulta ser muy buena para tomar turnos.
La simulación proporciona los conceptos básicos de cómo un automóvil de esta marca y peso debe moverse cuando va a la velocidad X y necesita girar en el ángulo Y, obviamente es más complicado que eso, pero entiendes la idea. Es bastante básico. Luego, el modelo consulta su entrenamiento, pero también está informado por los resultados del mundo real, que quizás puedan diferir de la teoría.
Por lo tanto, el automóvil da una vuelta al saber que, en teoría, debería tener que mover la rueda tanto a la izquierda, luego mucho más en este punto, y así sucesivamente. Pero los sensores en el automóvil informan que a pesar de esto, el automóvil se está desviando un poco de la línea deseada, y esta entrada se tiene en cuenta, lo que hace que el agente gire la rueda un poco más o menos, o lo que sea el caso. .
¿Y dónde entra el piloto de carreras, preguntas? Bueno, los investigadores necesitaban comparar el desempeño del auto con un conductor humano que sabe por experiencia cómo controlar un auto en sus límites de fricción, y esa es la definición de un corredor. Si sus llantas no están calientes, probablemente vaya demasiado lento.
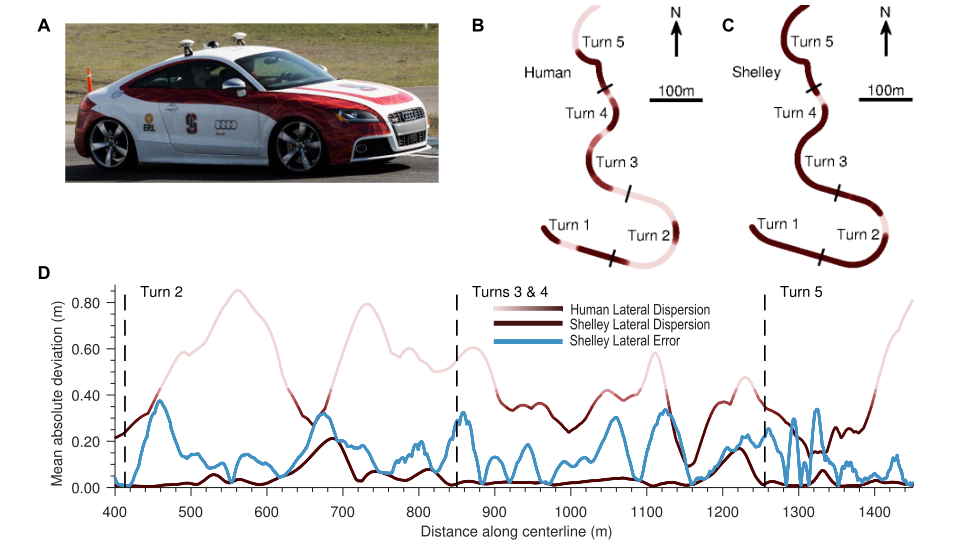
El equipo tenía al corredor (un “campeón piloto de carreras de autos de carrera”, tal como lo pusieron) manejando alrededor del Thunderhill Raceway Park en California, luego envió a Shelley, su Audi 2009 modificado y auto-conducido. TTS – alrededor también, diez veces cada uno. Y no fue un relajante paseo de domingo. Como el papel dice:
Tanto el vehículo automático como el participante humano intentaron completar el curso en el tiempo mínimo. Esto consistió en conducir a aceleraciones de cerca de 0.95 g mientras se seguía una trayectoria de carrera mínima en los límites físicos de adherencia del neumático. En este nivel combinado de aceleración longitudinal y lateral, el vehículo pudo alcanzar velocidades de 95 millas por hora (mph) en partes de la pista.
Incluso bajo estas condiciones de conducción extremas, el controlador pudo realizar un seguimiento constante de la línea de carreras con el error de seguimiento de la trayectoria media por debajo de 40 cm en todas partes de la pista.
En otras palabras, mientras tiraba de una G y llegaba a 95, el Audi de conducción automática nunca estaba a más de un pie y medio de su línea de carreras ideal. El conductor humano tenía una variación mucho más amplia, pero esto no se considera en absoluto un error: estaban cambiando la línea por sus propias razones.
“Nos enfocamos en un segmento de la pista con una variedad de giros que proporcionaron la comparación que necesitábamos y nos permitió recopilar más conjuntos de datos”, escribió Spielberg en un correo electrónico a TechCrunch. “Hemos hecho comparaciones de vuelta completa y las mismas tendencias se mantienen. Shelley tiene una ventaja de consistencia, mientras que los conductores humanos tienen la ventaja de cambiar su línea a medida que cambia el auto, algo que actualmente estamos implementando “.

Esto es bastante impresionante teniendo en cuenta la simplicidad del modelo de auto-conducción. Tenía muy poco conocimiento del mundo real en sus sistemas, principalmente los resultados de una simulación que le da una idea aproximada de cómo debería manejarse momento a momento. Y su retroalimentación fue muy limitada: no tuvo acceso a toda la telemetría avanzada que los sistemas de conducción automática utilizan a menudo para desarrollar la escena.
La conclusión es que este tipo de enfoque, con un modelo relativamente simple que controla el automóvil más allá de las condiciones normales de manejo, es prometedor. Tendría que ser ajustado para cada superficie y configuración: obviamente, un automóvil con tracción trasera en un camino de tierra sería diferente a la rueda delantera en el asfalto. La mejor manera de crear y probar dichos modelos es una cuestión para futuras investigaciones, aunque el equipo parecía seguro de que era un simple desafío de ingeniería.
El experimento se llevó a cabo con el fin de perseguir el objetivo aún lejano de que los autos que conducen por sí mismos sean superiores a los humanos en todas las tareas de conducción. Los resultados de estas primeras pruebas son prometedores, pero aún queda un largo camino por recorrer antes de que un AV pueda enfrentarse a un profesional cara a cara. Pero espero con ansias la ocasión.