Por mucho que nos gustaría pensar que estamos entrando en una era de robots autónomos, en realidad todavía están bastante indefensos. Para evitar que se caigan todo el tiempo, los reflejos rápidos de un humano podrían ser la solución. Pero el humano tiene que sentir lo que siente el robot, y eso es justo lo que estos investigadores están probando.
Los robots bípedos son excelentes en teoría para navegar en entornos humanos, pero naturalmente son más propensos a caerse que los robots cuadrúpedos o con ruedas. Aunque a menudo tienen algoritmos sofisticados que ayudan a mantenerlos en posición vertical, en algunas situaciones puede que no sean suficientes.
Como una forma de cerrar esa brecha, los investigadores del MIT y la Universidad de Illinois-Champaign crearon una especie de sistema híbrido humano-robot que recuerda a Pacific Rim o Evangelion, dependiendo de su alineación nerd (o Robot Jox, si lo desea). ir por ese camino).
Aunque las referencias pueden ser de ciencia ficción, la necesidad de este tipo de cosas es real, explicó U, de João Ramos, cocreador del sistema con Sangbae Kim del MIT.
“Nos motivó ver cómo se desarrollaba el terremoto de 2011 en Tohoku, Japón, el tsunami y el posterior desastre de la planta nuclear de Fukushima Dai-ichi. Pensamos que si un robot podría haber ingresado a la planta de energía después del desastre, las cosas podrían haber terminado de manera diferente ”, dijo Ramos en un comunicado de prensa de U of I.
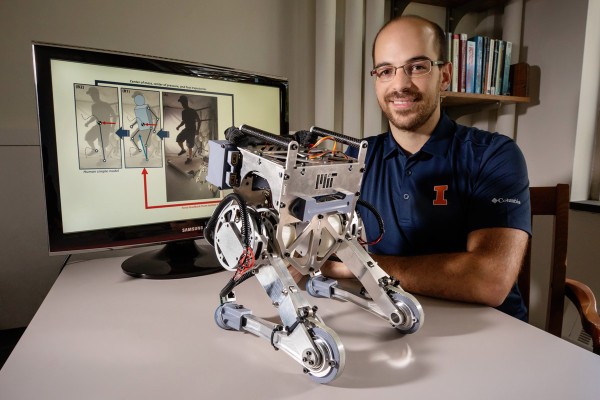
El robot que crearon es un pequeño bípedo que llaman Little Hermes, y está conectado directamente a un operador humano, que se para en una placa de detección de presión y usa un chaleco de retroalimentación de fuerza.

El robot generalmente sigue los movimientos del operador, no en un sentido 1: 1 (especialmente porque el robot es mucho más pequeño que una persona), pero después de interpretar esos movimientos en términos de centro de gravedad y vectores de fuerza, hace uno correspondiente casi simultáneamente. (La redacción del MIT entra en un poco más de detalle, al igual que el video a continuación).
Mientras tanto, si el robot encontrara, por ejemplo, una pendiente u obstáculo inesperado, aquellos Las fuerzas se transmiten al operador a través del chaleco. Sintiendo la presión que indica una inclinación hacia la izquierda, el operador dará un paso reflexivo en esa dirección utilizando esos excelentes instintos que los animales hemos desarrollado. Naturalmente, el robot hace lo mismo y, con suerte, se atrapa.
Este ciclo de retroalimentación podría hacer que los robots de rescate en el sitio y otros en condiciones inciertas sean más confiables. Sin embargo, la tecnología no se limita a las piernas, o incluso a Little Hermes. El equipo quiere establecer sistemas de retroalimentación similares para pies y manos, para que la movilidad y el agarre puedan mejorarse aún más.
El equipo publicó su trabajo hoy en la revista Science Robotics.