
A pesar de lo que esa mancha olvidada en su camisa blanca pueda hacerle creer, los humanos son bastante buenos para caminar con una taza de café y evitar derrames, incluso si nuestra tasa de éxito no es del 100 por ciento. Cada vez que logras llevar tu taza de café de un lugar a otro sin derrames, estás completando intuitivamente una hazaña física poco entendida: manipular un objeto complejo como un líquido.
Eso es según un grupo de investigadores de la Universidad Estatal de Arizona (ASU) que ha estado modelando el fenómeno del transporte de café en un intento de imbuir a los robots con la misma delicadeza. En un mundo de creciente automatización, se espera que las máquinas realicen movimientos más diestros, explica Brent Wallace, Ph.D. estudiante de la Escuela de Ingeniería Eléctrica, Informática y Energética de ASU que participó en el trabajo. “Pero incluso para tareas simples, como llevar una taza de agua o una taza de café, el robot tiene dificultades. Todos los días, usted y yo hacemos una taza de café, y 99 de cada 100 días, no lo derramamos sobre nosotros mismos”, dice Wallace. “Entonces, ¿cómo obtenemos influencia para abordar ese tipo de problemas? Bueno, estudiemos cómo se comportan los humanos en esas situaciones”.
☕️ La ciencia explica el mundo que nos rodea. Te ayudaremos a entenderlo todo: únete a Pop Mech Pro.
Sobre la base de un trabajo anterior en la Universidad Northeastern, que descubrió que los humanos tienen dos enfoques principales para manipular un objeto complejo como un fluido, el equipo de ASU simuló esas respuestas, analizando con láser la fase de transición entre los dos para comprender por qué los humanos exhiben una respuesta binaria: y ver cómo los robots podrían aprender a hacer lo mismo en el futuro. Los hallazgos fueron publicados en la revista Revisión Física Aplicada a finales de 2021.
El enfoque n. ° 1 se denomina estrategia de baja frecuencia e involucra a participantes humanos que ejercen una fuerza de ida y vuelta constante y de cambio lento en la taza de café. Como resultado, si mueves la taza hacia la izquierda, el java del interior hace lo mismo, como un péndulo. Esto se llama sincronización en fase. Alternativamente, el enfoque n. ° 2 es una estrategia de alta frecuencia en la que las personas ejercen una fuerza brusca y que cambia rápidamente en la taza. Como resultado de este enfoque, si giras la taza hacia la izquierda, el java del interior se mueve hacia el lado derecho de la taza. Esto se conoce como sincronización en antifase.
Dado que ambas estrategias funcionaron, aunque en los extremos opuestos del espectro, Wallace asumió que algunos participantes en el estudio de Northeastern alternaban entre los dos enfoques, moviendo la taza con gusto en algunas situaciones y con más delicadeza en otras ocasiones. Eso lo dejó preguntándose: ¿Dónde ocurre la transición entre la sincronización en fase y antifase?
Para probar su hipótesis, Wallace preparó un experimento mecánico simulado para poder utilizar un número ilimitado de sujetos de prueba. Eligió montar un modelo no lineal de un péndulo unido a un carro en movimiento. El carrito representa la taza y el péndulo representa el café que se desborda. Un sistema no lineal tiene en cuenta todo el comportamiento caótico que puede existir en nuestra taza de café, explica Wallace. La mayoría de los sistemas del mundo real son no lineales porque son difíciles de definir y no existen en el vacío. Mientras conduce un automóvil, por ejemplo, irá a 50 mph si presiona el pedal del acelerador, pero no irá a 5,000 mph si sigue presionando hacia abajo. Un sistema lineal, por el contrario, es mucho más predecible: un sistema de resorte o un reloj siempre se moverán de la misma manera regular. Pensando matemáticamente, esto se verifica. El gráfico de la ecuación lineal. y = X es siempre una línea recta; mientras tanto, el gráfico de y = X2 es una ecuación no lineal que parece una curva y representa varias soluciones, no solo una.
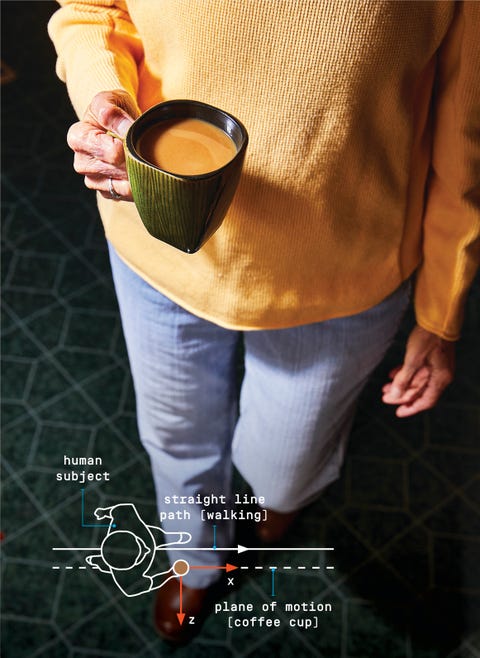
Alyse Markel/Mecánica Popular
Wallace y su equipo encontraron que la fase de transición entre cada una de las estrategias variaba, pero que en ambos casos, los humanos podían cambiar entre los enfoques “de manera abrupta y eficiente”, según su artículo. La fase de transición, como era de esperar, fue la más caótica o impredecible. Pero los humanos se alejaron de ese término medio, aferrándose a un enfoque u otro.
Los investigadores creen que pueden implementar estos controles en los robots para hacer que sus movimientos sean más predecibles y fiables, manipulando de forma adaptativa objetos complejos en entornos en constante cambio. Si bien actualmente es posible programar máquinas para que funcionen de forma binaria, como los humanos que derraman vigorosamente su taza de café o caminan suavemente con ella, los robots aún no están lo suficientemente refinados para manejar el cambio entre los dos modos. En una línea de fabricación, por ejemplo, los sistemas de péndulo colgante son bastante comunes, dice Wallace. Al controlar los grados de libertad internos en un sistema de fabricación como este, un brazo robótico puede soldar de manera más confiable la pieza correcta sin sobrepasar y fusionar otra sección.
Este paradigma también podría conducir a mejores prótesis, según Ying-Cheng Lai, profesor de la Escuela de Ingeniería Eléctrica, Informática y Energética de ASU que participó en el trabajo. Digamos que tiene una prótesis y quiere hacer una taza de café. Tienes que enviar una señal de tu cerebro a la prótesis, pero es difícil hacer que coincidan. “Si tiene una idea de lo que quiere que haga la prótesis, como preparar la taza de café, podría incorporar ese tipo de intuiciones naturales que el ser humano tiene en un escenario normal para filtrar los comandos de referencia que provienen del cerebro”. el explica.
Para que todo esto sea una realidad, aún se requiere más trabajo para cuantificar mejor los cambios sutiles entre los enfoques. Wallace dice que el equipo intentará estudiar sistemas con más grados de libertad, como un péndulo del que cuelga otro péndulo. Si todo sale bien, algún día podríamos ver robots que se mueven con intención cuidadosa, como nosotros.
🍳 Más Física de la cocina: esta es la razón por la que la comida se pega a la sartén
Puede agradecer a la convección termocapilar por hacer que su comida se pegue a su sartén favorita. Así es, la física puede explicar por qué, a veces, tus carnes y verduras se atascan durante la cocción. El fenómeno hace que el aceite caliente forme gotas, se rompa y se extienda a los bordes exteriores de una sartén, dejando el temido punto seco en el medio.
La investigación dirigida por Alexander Fedorchenko de la Academia Checa de Ciencias descubrió que este tipo de convección era el resultado de un calentamiento desigual. Una vez que el aceite de cocina alcanza un punto críticamente delgado, lo que en este estudio ocurrió consistentemente en el medio de la sartén, se rompe debido a la pérdida de tensión superficial. Para aliviar el problema, intente usar un poco más de aceite para que sea más difícil alcanzar ese punto de ruptura críticamente delgado.
—margarita hernandez
Este contenido lo crea y mantiene un tercero, y se importa a esta página para ayudar a los usuarios a proporcionar sus direcciones de correo electrónico. Es posible que pueda encontrar más información sobre este y contenido similar en piano.io