Uno de los trabajos para los que los robots son más adecuados es la tarea tediosa y repetitiva de “recoger y colocar” común en los almacenes, pero los humanos aún lo hacen mucho mejor. Los investigadores de UC Berkeley están acelerando el ritmo con un par de modelos de aprendizaje automático que funcionan juntos para permitir que un brazo robótico planifique su agarre y trayectoria en solo milisegundos.
Las personas no tienen que pensar mucho en cómo levantar un objeto y dejarlo en otro lugar; no es solo algo que hemos tenido años de práctica haciendo todos los días, sino que nuestros sentidos y cerebros están bien adaptados para la tarea. Nadie piensa, “¿qué pasa si levanto la taza, luego la muevo hacia arriba y luego hacia los lados, luego muy lentamente hacia la mesa?”, Los caminos por los que podemos mover un objeto son limitados y generalmente bastante eficientes.
Los robots, sin embargo, no tienen sentido común ni intuición. Al carecer de una solución “obvia”, necesitan evaluar miles de caminos potenciales para levantar un objeto y moverlo, y eso implica calcular las fuerzas involucradas, posibles colisiones, si afecta el tipo de agarre que se debe usar, etc. .
Una vez que el robot decide qué hacer, puede ejecutarse rápidamente, pero esa decisión lleva tiempo, varios segundos en el mejor de los casos, y posiblemente mucho más dependiendo de la situación. Afortunadamente, los especialistas en robótica de UC Berkeley han encontrado una solución que reduce el tiempo necesario para hacerlo en aproximadamente un 99 por ciento.
El sistema utiliza dos modelos de aprendizaje automático que trabajan en relevo. El primero es un generador de fuego rápido de caminos potenciales para que el brazo robótico tome en base a toneladas de movimientos de ejemplo. Crea un montón de opciones, y un segundo modelo ML, entrenado para elegir lo mejor, elige entre ellas. Sin embargo, este camino tiende a ser un poco accidentado y debe ser ajustado por un planificador de movimiento dedicado, pero dado que el planificador de movimiento recibe un “comienzo cálido” con la forma general del camino que debe tomarse, su toque final es sólo un momento de trabajo.
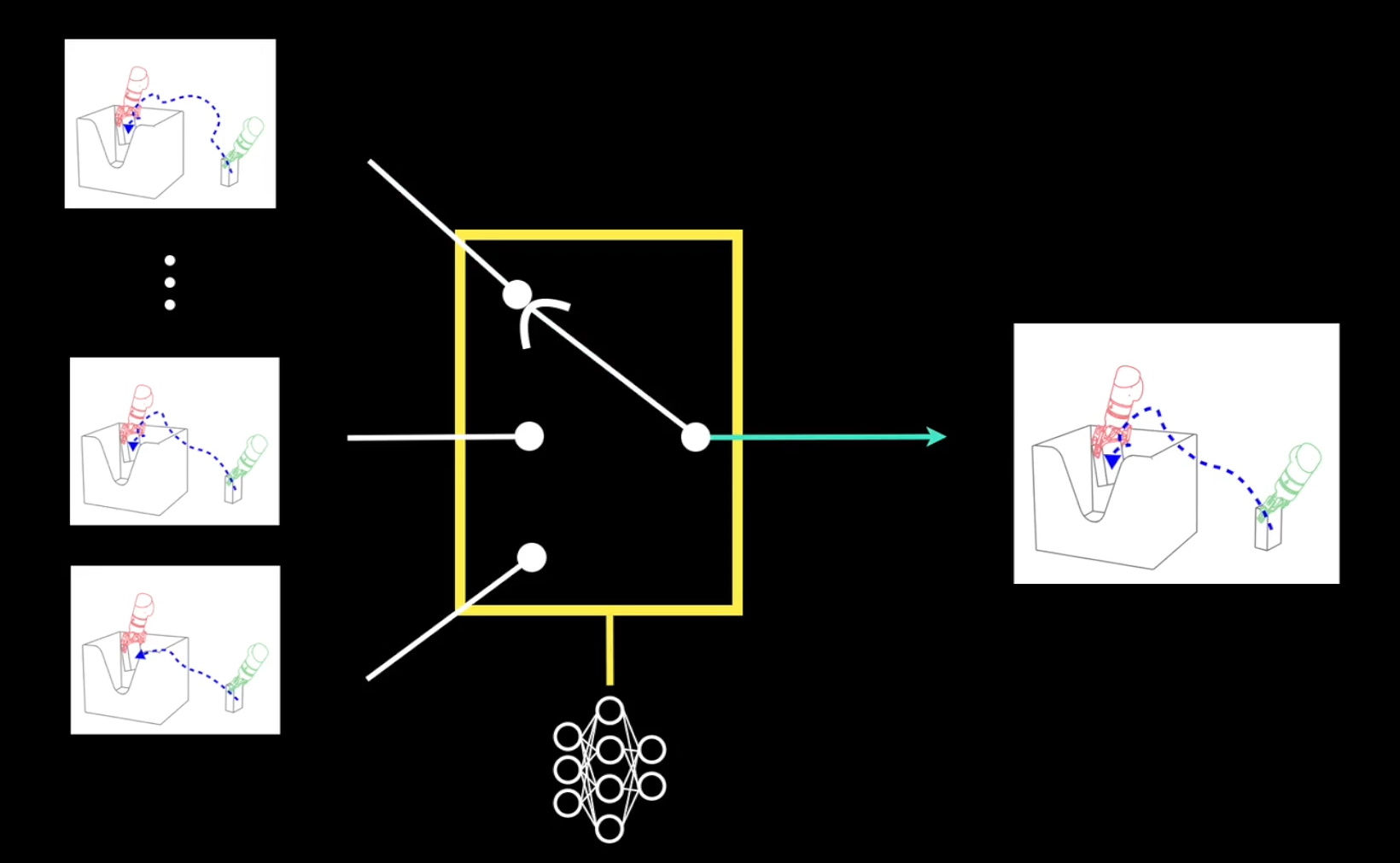
Diagrama que muestra el proceso de decisión: el primer agente crea caminos potenciales y el segundo selecciona el mejor. Un tercer sistema optimiza la ruta seleccionada.
Si el planificador de movimiento funcionaba por sí solo, solía tardar entre 10 y 40 segundos en finalizar. Con el comienzo cálido, sin embargo, rara vez tomó más de un décimo de un segundo.
Sin embargo, ese es un cálculo de laboratorio y no lo que vería en una situación real de piso de almacén. El robot en el mundo real también tiene que realizar la tarea, que solo se puede hacer tan rápido. Pero incluso si el período de planificación del movimiento en un entorno del mundo real fue de solo dos o tres segundos, reducirlo a casi cero se suma extremadamente rápido.
“Cada segundo cuenta. Los sistemas actuales dedican hasta la mitad de su tiempo de ciclo a la planificación del movimiento, por lo que este método tiene el potencial de acelerar drásticamente las recolecciones por hora ”, dijo el director del laboratorio y autor principal Ken Goldberg. Detectar el entorno correctamente también requiere mucho tiempo, pero se acelera gracias a las capacidades mejoradas de visión por computadora, agregó.
En este momento, los robots que seleccionan y colocan no están ni cerca de la eficiencia de los humanos, pero pequeñas mejoras se combinarán para hacerlos competitivos y, eventualmente, más que competitivos. El trabajo cuando lo realizan humanos es peligroso y agotador, sin embargo, millones lo hacen en todo el mundo porque no hay otra forma de satisfacer la demanda creada por la creciente economía minorista en línea.
La investigación del equipo se publica esta semana en la revista Science Robotics.