- Investigadores de la Universidad de Zhejiang en China han creado un nuevo tipo de unidad de succión al vacío para ayudar a los robots trepadores de paredes a atravesar cualquier tipo de superficie.
- Los dispositivos de succión de vacío tradicionales fallan en superficies rugosas o texturizadas debido a fugas de vacío. El nuevo método de succión busca resolver este problema.
- La investigación fue publicada a principios de este mes en la revista científica. Física de fluidos.
Los robots para escalar paredes que escalan los costados de los edificios de gran altura y limpian el vidrio no son nuevos. Tampoco son los Hombre araña-como robots que conducen en entornos industriales e inspeccionan tubos de calderas, tanques de propano, silos de combustible y más desde los lados de las superficies.
Pero aunque estos bots han existido durante años, generalmente tienen un defecto fatal: si alguno de los entornos que tocan tiene solo un toque de textura o aspereza, las máquinas fallan instantáneamente. Esto se debe a que la textura interrumpe el sello de vacío que se encuentra entre las ventosas y la superficie en la que operan los robots.
Para construir robots que puedan adherirse mejor a las fachadas desafiantes, los investigadores de la Universidad de Zhejiang en Hangzhou, China, han reinventado las ventosas que estos bots usan para agarrarse a las paredes.

Kaige Shi y Xin Li
Cuando una ventosa se adhiere a una superficie rugosa en lugar de a una lisa, deja huecos que un anillo de sellado solo no puede cerrarse lo suficiente, dicen Kaige Shi y Xin Li, los investigadores detrás del nuevo estudio, que se publicó en Física de fluidos. El aire puede escapar del ambiente exterior hacia la zona de vacío, cambiando la presión dentro y disminuyendo el sello de vacío hasta que se destruya por completo.
Shi y Li tomaron ese concepto y construyeron un robot que podía escalar incluso paredes exteriores de edificios ásperas e inacabadas. Utilizando el agua y los conceptos básicos de la fuerza centrífuga, los científicos pudieron superar cualquier fuga creando un anillo de agua giratorio de alta velocidad que podía mantener el vacío, a pesar de las restricciones de la superficie.
¿Qué tan práctico es para los robots de escalada usar agua de esta manera? El jurado aún está deliberando. Después de todo, imagine si el robot se quedó sin suministro de agua mientras limpiaba el piso 60 de un rascacielos. Pero mientras tanto, esta idea de extender la capacidad de vacío de la ventosa es un enfoque inteligente.
¿Por qué se caen las ventosas?
Es frustrante cuando una ventosa simplemente no se adhiere a una superficie dada, ya sea la baldosa texturizada en su ducha o un revestimiento en una tubería. En ambos casos, las superficies ásperas tienen la culpa. Esto no se debe a que ciertas texturas son inherentemente difíciles de agarrar inicialmente por las ventosas (su radio AM / FM a prueba de agua podría adherirse perfectamente a la pared de la ducha antes de caer al suelo), sino más bien porque las superficies texturizadas se meten con el sello del que dependen las ventosas .
Piense en una pared de ladrillo exterior en una casa. Sabes que una ventosa no duraría cinco segundos en ese tipo de superficie, pero la razón por la cual no es tan intuitiva. Todo se reduce al flujo de aire desde la atmósfera exterior hacia una zona de vacío, impulsada por las diferencias de presión. El principio de Le Chatelier nos dice que los cambios de temperatura, presión, volumen o concentración darán lugar a cambios opuestos predecibles en un sistema dado a medida que intenta alcanzar un nuevo estado de equilibrio. Aquí, la presión dentro del vacío se ajusta lentamente a la presión atmosférica a medida que entra más aire.

Kaige Shi y Xin Li
En la figura anterior, la fuga de vacío está determinada por el flujo de aire desde la atmósfera a la zona de vacío, impulsada por las diferencias de presión en el límite, que se ilustra con una línea discontinua. Para que se produzca una fuga de vacío, se deben cumplir dos condiciones:
- Debe haber una ruta de flujo que conecte la atmósfera y la zona de vacío (básicamente una ruptura en el sello).
- Debe existir una diferencia de presión en el límite de la zona de vacío.
Si bien los científicos ciertamente han creado mejores sellos que pueden deformarse ligeramente para cerrar los espacios entre el anillo de sellado y la superficie rugosa, eso solo ayuda marginalmente. Cuando la superficie en la que está trabajando se vuelve más y más áspera, los espacios en el sello se hacen más grandes y la resistencia al flujo de esos espacios se vuelve más pequeña. Eso significa que el caudal de la atmósfera exterior aumenta y finalmente destruye la cámara de vacío.
El método de diferencia de presión cero
Shi y Li crearon una ventosa que se basa en una corriente de agua giratoria para mantener un sello sobre cualquier superficie. Este nuevo método para prevenir fugas de vacío elimina cualquier diferencia de presión en el límite de la zona de vacío. Los investigadores lo llaman el “método de diferencia de presión cero (ZPD)”.
“Para eliminar la diferencia de presión en el límite de la zona de vacío, la presión en el límite debe ser igual a la presión atmosférica, mientras se mantiene un alto vacío en la zona”, escriben Shi y Li en su trabajo de investigación. Entonces, los científicos querían crear un gradiente de presión estable cerca de la línea límite de la ventosa.
Como se muestra en la imagen a continuación, su método ZPD utiliza una capa giratoria de agua en el exterior de la zona de vacío para crear un gradiente de presión. Dentro de la capa de agua, hay un alto vacío. La presión aumenta radialmente y alcanza el mismo nivel que la presión atmosférica fuera de la capa de agua. Como ya no hay diferencia de presión en el límite, la segunda condición para la fuga de vacío se rompe.

Kaige Shi y Xin Li
Shi y Li diseñaron una nueva ventosa con su método de diferencia de presión cero en mente. Tanto el regulador como la unidad de succión se imprimieron en 3D. De manera similar a otras unidades de succión, un anillo de goma de espuma de nitrilo está incrustado en la periferia exterior de la cámara. Un motor acciona un ventilador que está fijo en la cámara. Se utiliza una bomba de microvacío para evacuar el aire inicial, creando una zona de vacío en la cámara. El agua en el depósito es suministrada por una fuente de agua exterior.

Kaige Shi y Xin Li
¡Escaladores de pared, uníos!
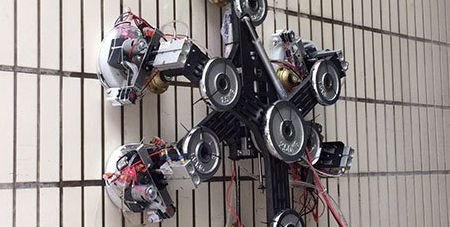
Shi y Li probaron su nueva idea de succión a través de tres aparatos, incluido un Hombre arañaestilo robot (que se muestra en el video de arriba), un robot que trepa paredes con las nuevas ventosas con diferencia de presión cero y un brazo robótico. En cada caso, puede ver que el agua sale del dispositivo cuando se mueve la ventosa. En la práctica, eso significa que un robot para escalar paredes usando esta técnica necesitará mucha agua para deambular.
Este robot se une a una clase de máquinas con forma de araña que pueden escalar paredes, generalmente con ventosas, pero no siempre. La startup Gecko Robotics, por ejemplo, utiliza su flota de robots para inspeccionar espesores, grietas, picaduras y otras formas de degradación en entornos industriales, como el interior de tanques, calderas, depuradores y tuberías. Estas máquinas usan adhesión magnética, en lugar de adhesión por succión, para hacer el trabajo.
Mientras tanto, otro tipo de robot gecko de la Universidad Simon Fraser en Columbia Británica utiliza las fuerzas de Van der Waals para adherirse a las paredes. Las pistas en forma de tanque de este bot están cubiertas con un adhesivo seco, un polímero que se asemeja al silicio y permite la adhesión sin químicos ni energía adicionales. Las moléculas en la sustancia son dipolos temporales, lo que significa que tienen un lado con carga positiva y un lado con carga negativa. Los polos cargados son atraídos a sus opuestos correspondientes en la pared que el robot está subiendo.
Para que florezca la nueva clase de escaladores de pared, los investigadores como Shi y Li deben encontrar una manera de permitir que los robots almacenen el agua necesaria dentro del aparato, en lugar de conectar las máquinas a un suministro de agua. No está claro si eso será comercialmente viable o no. Pero por ahora, sabemos que los palos de la ciencia.
Source link