

Según Facebook AI Research, la próxima generación de robots debería ser mucho mejor para sentir, no emociones, por supuesto, pero usar el sentido del tacto. Y para hacer avanzar la pelota en esta área relativamente nueva de investigación en inteligencia artificial y robótica, la compañía y sus socios han construido un nuevo tipo de piel electrónica y la yema del dedo que son económicos, duraderos y brindan un sentido táctil básico y confiable a nuestros amigos mecánicos.
La pregunta de por qué exactamente Facebook está investigando la piel de un robot es lo suficientemente obvia como para que el jefe de inteligencia artificial, Yann LeCun, la asumió de manera preventiva en una llamada a los medios para mostrar los nuevos proyectos.
Curiosamente, recordó, comenzó con Zuckerberg señalando que la compañía no parecía tener una buena razón para estar investigando la robótica. LeCun parece haber tomado esto como un desafío y comenzó a investigarlo, pero una respuesta clara surgió con el tiempo: si Facebook iba a estar en el negocio de proporcionar agentes inteligentes, ¿y qué corporación tecnológica que se precie no lo es? – entonces esos agentes necesitan entender el mundo más allá de la salida de una cámara o micrófono.
El sentido del tacto no es muy bueno para saber si algo es una imagen de un gato o un perro, o quién está hablando en una habitación, pero si los robots o las IA planean interactuar con el mundo real, necesitan más que eso.
“En lo que nos hemos vuelto buenos es en comprender los píxeles y las apariencias”, dijo el científico investigador de FAIR Roberto Calandra, “Pero comprender el mundo va más allá de eso. Necesitamos avanzar hacia una comprensión física de los objetos para fundamentar esto “.
Si bien las cámaras y los micrófonos son baratos y hay muchas herramientas para procesar esos datos de manera eficiente, no se puede decir lo mismo del tacto. Los sensores de presión sofisticados simplemente no son productos de consumo populares, por lo que los que son útiles tienden a permanecer en laboratorios y entornos industriales.
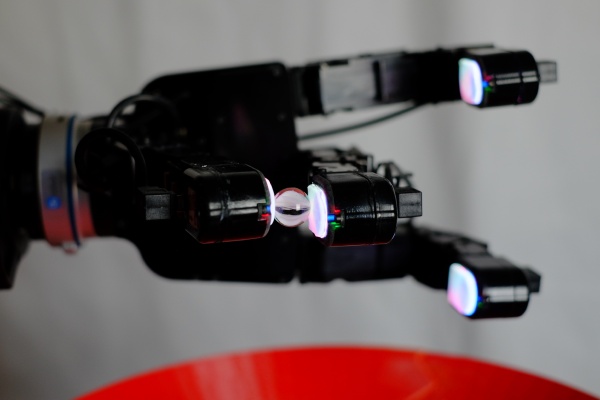
DIGIT fue lanzado en 2020 como un diseño de código abierto; utiliza una pequeña cámara que apunta a las almohadillas para producir una imagen detallada del elemento que se toca. Puede ver las yemas de los dedos en la imagen en la parte superior; es bastante sensible, como puede ver en los mapas detallados que puede crear al tocar varios elementos:
Créditos de imagen: Facebook
El proyecto DIGIT tiene raíces que se remontan a 2009; escribimos sobre el proyecto del MIT llamado GelSight en 2014, luego nuevamente en 2020: la compañía se ha extendido y ahora es el socio de fabricación de este enfoque bien documentado del tacto. (Actualizar: Inicialmente mezclé los nombres y los métodos de estos sistemas y he modificado esta sección para que quede claro: DIGIT y GelSight están relacionados y usan un método basado en una cámara, ReSkin usa el enfoque de partículas magnéticas como se describe a continuación. Totalmente mi error.)
El sistema ReSkin utiliza un enfoque diferente. Básicamente, tiene partículas magnéticas suspendidas en una superficie de gel suave, y un magnetómetro debajo puede detectar el desplazamiento de esas partículas, traduciendo esos movimientos en mapas de fuerza precisos de las presiones que causan el movimiento.
Una de las ventajas del sistema de tipo ReSkin es que el componente duro (el chip con el magnetómetro y la lógica, etc.) está totalmente separado del componente blando, que es solo una almohadilla flexible impregnada de puntos magnéticos. Eso significa que la superficie se puede ensuciar o rayar y se puede reemplazar fácilmente, mientras que la parte sensible se puede esconder de forma segura debajo.
En el caso de ReSkin, significa que puede conectar un montón de chips en cualquier forma y colocar una losa de elastómero magnético encima, luego integrar las señales y obtendrá información táctil de todo. Bueno … no es tan simple, ya que tienes que calibrarlo y todo, pero es mucho más simple que otros sistemas de piel artificial que eran posibles de operar a escalas de más de un par de pulgadas cuadradas.
Incluso puedes convertirlo en zapatitos para perros, porque ¿por qué no?
Imagen animada de un buen perro con almohadillas sensibles a la presión en sus patas y las lecturas de ellas. Créditos de imagen: Facebook
Con una superficie sensible a la presión como esta, los robots y otros dispositivos pueden detectar más fácilmente la presencia de objetos y obstáculos, sin depender, digamos, de la fricción adicional de la articulación que ejerce fuerza en esa dirección. Esto podría hacer que los robots de asistencia sean mucho más suaves y sensibles al tacto, no es que haya muchos robots de asistencia para empezar. Pero parte de la razón es porque no se puede confiar en que no aplasten cosas o personas, ¡ya que no tienen un buen sentido del tacto!
El trabajo de Facebook aquí no se trata de nuevas ideas, sino de hacer que un enfoque eficaz sea más accesible y asequible. El marco de software se lanzará públicamente y los dispositivos se pueden comprar a un precio bastante bajo, por lo que será más fácil para otros investigadores ingresar al campo.