
Los drones son útiles de innumerables maneras, pero esa utilidad suele estar limitada por el tiempo que pueden permanecer en el aire. ¿No deberían los drones ser capaces de quitar una carga también? Con estas garras especiales adheridas, pueden posarse o colgarse con facilidad, conservando la energía de la batería y extendiendo enormemente su tiempo de vuelo.
Las garras, creadas por un equipo altamente multinacional de investigadores que listaré al final, están inspiradas en pájaros y murciélagos. El equipo notó que muchos animales voladores tienen patas o garras especialmente adaptadas para sujetar a la criatura a su superficie favorita. A veces se sientan, a veces cuelgan, a veces simplemente se apoyan en ella y no tienen que batir tan fuerte.
 Como escriben los investigadores:
Como escriben los investigadores:
En todos estos casos, parte del pie del animal con una forma adecuada interactúa con una estructura en el medio ambiente y facilita la necesidad de generar menos sustentación o de que el vuelo de poder se pueda suspender por completo. Nuestro objetivo es usar el mismo concepto, que comúnmente se conoce como “perching”, para UAVs [unmanned aerial vehicles].
“Perching”, usted dice? Seguir…
Diseñamos un armazón de tren de aterrizaje modular y accionado para los UAV de ala giratoria que consta de un módulo de agarre accionado y un conjunto de módulos de contacto que se montan en los dedos de la pinza.
Esta modularización aumentó sustancialmente la gama de posibles estructuras que pueden explotarse para posarse y descansar en comparación con las pinzas de inspiración aviar.
En lugar de intentar construir un mecanismo complejo, como un par de pies articulados, el equipo le dio a los drones un conjunto de módulos estáticos impresos en 3D con una forma especial y una gran pinza.
El dron recorre sus alrededores utilizando un lidar o algún otro sensor sensible a la profundidad. Esto le permite caracterizar las superficies cercanas y relacionarlas con una biblioteca de ejemplos en los que sabe que puede descansar.

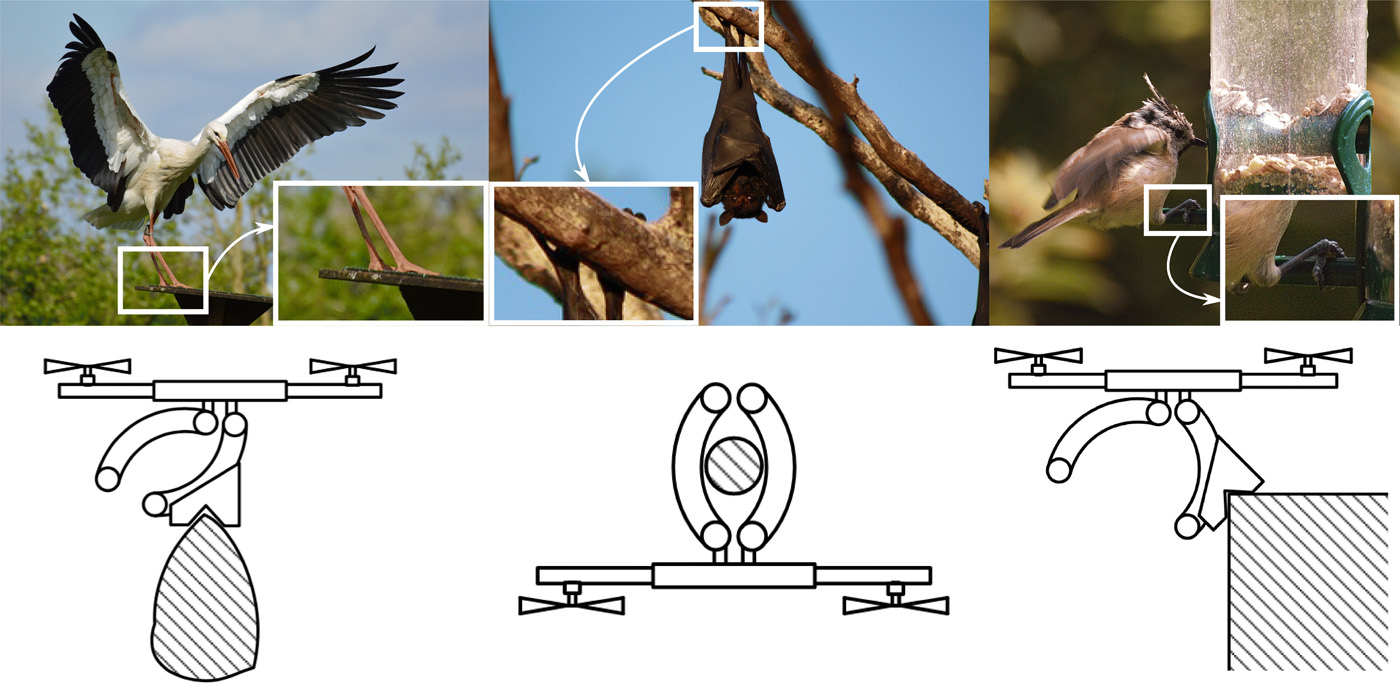
Los bordes cuadrados como los de la parte superior derecha pueden apoyarse como en A, mientras que un palo se puede equilibrar como en B.
Si el drone ve y necesita descansar en un palo, puede agarrarlo desde arriba. Si se trata de una barra horizontal, puede agarrarla y colgarla debajo, levantándola de nuevo cuando sea necesario. Si es una repisa, puede usar un pequeño recorte para apoyarse contra la esquina, lo que permite que se apague o todos sus motores. Estos módulos se pueden intercambiar o modificar fácilmente según la misión.
Debo decir que todo parece funcionar muy bien para un prototipo. La parte difícil parece ser el reconocimiento de superficies útiles y el posicionamiento preciso requerido para aterrizar sobre ellas correctamente. Pero es lo suficientemente útil, especialmente en aplicaciones militares y profesionales, como se sospecha, que parece ser una característica común en unos pocos años.
El artículo que describe este sistema fue publicado en la revista Science Robotics. No quiero dejar a nadie fuera, así que es por: Kaiyu Hang, Ximin Lyu, Haoran Song, Johannes A. Stork, Aaron M. Dollar, Danica Kragic y Fu Zhang, de Yale, la Universidad de Ciencia y Tecnología de Hong Kong. , la Universidad de Hong Kong y el Real Instituto de Tecnología KTH.