Si los robots realmente nos ayudan en la casa o cuidan a nuestros heridos y ancianos, van a querer dos manos … al menos. Pero usar las dos manos es más difícil de lo que parece, por lo que este sistema de control robótico aprende de los humanos antes de intentar hacer lo mismo.
La idea detrás de la investigación, de la Universidad de Wisconsin-Madison, no es construir un robot de dos manos desde cero, sino simplemente crear un sistema que comprenda y ejecute el mismo tipo de manipulaciones que hacemos los humanos sin pensar en ello. .
Por ejemplo, cuando necesitas abrir un frasco, lo agarras con una mano y lo mueves a su posición, luego lo aprietas mientras la otra mano agarra la tapa y la retuerce o la saca. En esta acción elemental con dos manos hay tantas cosas que sería inútil pedirle a un robot que lo haga de manera autónoma en este momento. Pero ese robot aún podría tener una idea general de por qué se realiza este tipo de manipulación en esta ocasión, y hacer lo que pueda para perseguirlo.
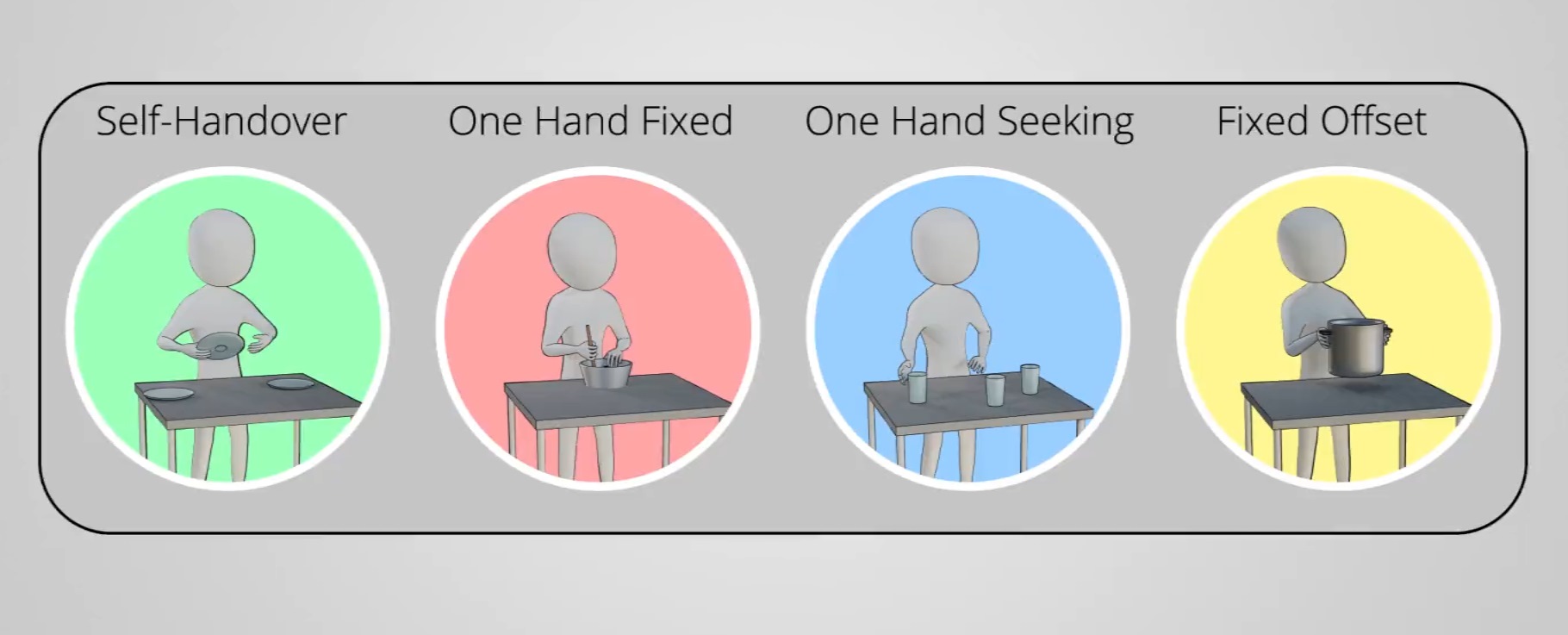
Los investigadores primero hicieron que los humanos que llevaban un equipo de captura de movimiento realizaran una variedad de tareas cotidianas simuladas, como apilar vasos, abrir recipientes y verter el contenido, y recoger elementos con otras cosas equilibradas en la parte superior. Todos estos datos, a dónde van las manos, cómo interactúan, etc., fueron masticados y analizados por un sistema de aprendizaje automático, que descubrió que las personas solían hacer una de cuatro cosas con las manos:
- Auto-entrega: Aquí es donde levanta un objeto y lo pone en la otra mano para que sea más fácil ponerlo donde va, o para liberar la primera mano para hacer otra cosa.
- Una mano fija: Un objeto se mantiene firme con una mano, lo que proporciona un agarre fuerte y rígido, mientras que la otra realiza una operación en él, como quitar una tapa o agitar el contenido.
- Desplazamiento fijo: Ambas manos trabajan juntas para levantar algo y girarlo o moverlo.
- Buscando una mano: No es realmente una acción a dos manos, pero el principio de mantener deliberadamente una mano fuera de acción mientras la otra encuentra el objeto requerido o realiza su propia tarea.
El robot puso en práctica este conocimiento no para realizar las acciones en sí mismas. De nuevo, estos son movimientos extremadamente complejos que los AI actuales no pueden ejecutar, sino en sus interpretaciones de movimientos realizados por un controlador humano.
 Usted pensaría que cuando una persona está controlando un robot de forma remota, simplemente reflejaría los movimientos de la persona exactamente. Y en las pruebas, el robot lo hace para proporcionar una línea de base de cómo, sin el conocimiento de estas “acciones bimanuales”, muchas de ellas son simplemente imposibles.
Usted pensaría que cuando una persona está controlando un robot de forma remota, simplemente reflejaría los movimientos de la persona exactamente. Y en las pruebas, el robot lo hace para proporcionar una línea de base de cómo, sin el conocimiento de estas “acciones bimanuales”, muchas de ellas son simplemente imposibles.
Piensa en el ejemplo de abrir un frasco. Sabemos que cuando abrimos el frasco, tenemos que mantener un lado firme con un agarre más fuerte e incluso es posible que tengamos que empujar hacia atrás con la mano del frasco contra el movimiento de la mano que se abre. Si intentaste hacer esto de forma remota con brazos robóticos, esa información ya no está presente, y una mano probablemente sacará el frasco del agarre de la otra, o no podrá agarrarlo correctamente porque la otra no está ayudando .
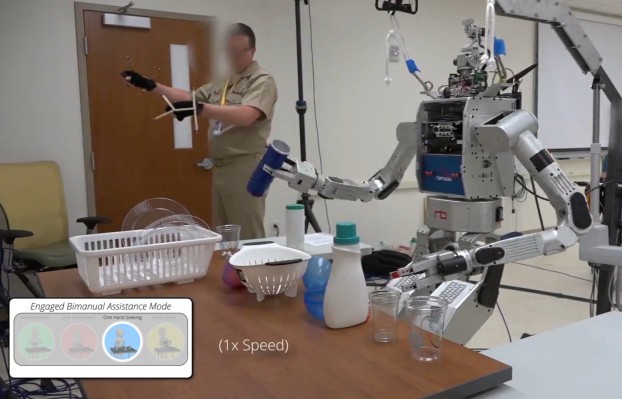
El sistema creado por los investigadores reconoce cuándo está ocurriendo una de las cuatro acciones anteriores y toma medidas para asegurarse de que sean un éxito. Eso significa, por ejemplo, ser conscientes de las presiones ejercidas sobre cada brazo por el otro cuando recogen un cubo juntos. O proporcionar rigidez adicional al brazo que sujeta un objeto mientras el otro interactúa con la tapa. Incluso cuando solo se usa una mano (“búsqueda”), el sistema sabe que puede desfiorizar los movimientos de la mano no utilizada y dedicar más recursos (ya sean movimientos del cuerpo o potencia de cálculo) a la mano que trabaja.
En los videos de demostraciones, parece claro que este conocimiento mejora en gran medida la tasa de éxito de los intentos de los operadores remotos para realizar un conjunto de tareas destinadas a simular la preparación de un desayuno: rajar huevos (falsos), remover y cambiar cosas, recoger una bandeja con gafas puestas y manteniéndola a nivel.
Por supuesto, todo esto todavía lo está haciendo un ser humano, más o menos, pero las acciones del ser humano están siendo aumentadas y reinterpretadas en algo más que la simple reproducción mecánica.
Hacer estas tareas de manera autónoma está muy lejos, pero una investigación como esta constituye la base de ese trabajo. Antes de que un robot intente moverse como un humano, debe comprender no solo cómo se mueven los humanos, sino también por qué hacen ciertas cosas en determinadas circunstancias y, además, qué procesos importantes pueden estar ocultos de la observación obvia, como planificar la ruta de la mano. elegir una ubicación de agarre, y así sucesivamente.
El equipo de Madison fue dirigido por Daniel Rakita; su artículo que describe el sistema se publica en la revista Science Robotics.