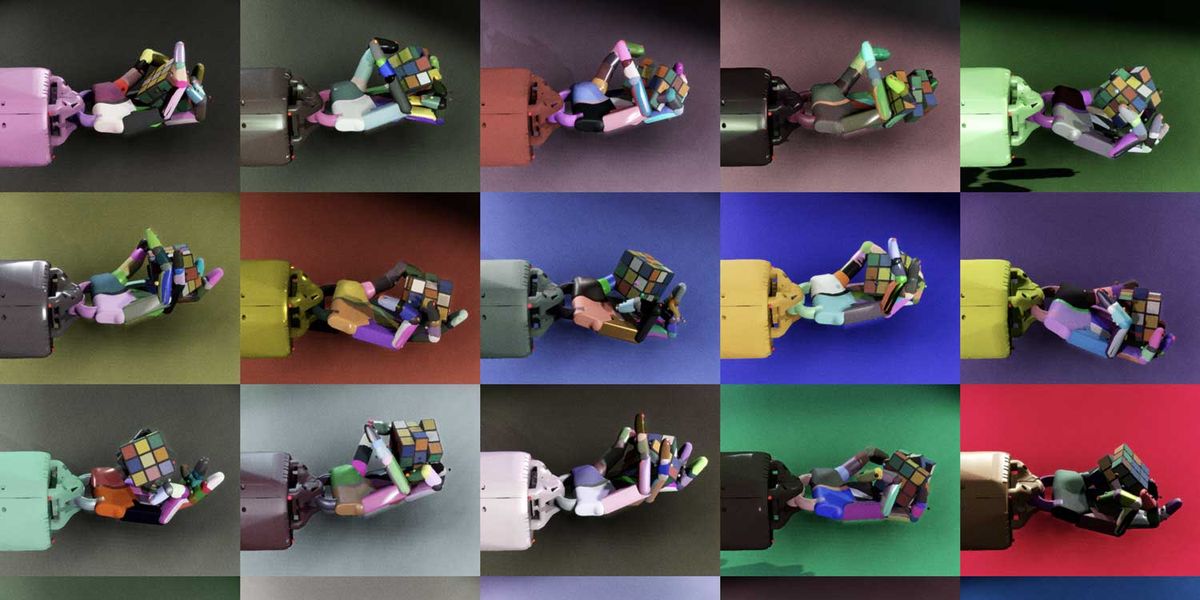
- OpenAI, un grupo de investigación con sede en San Francisco centrado en el estudio de la inteligencia artificial para ayudar a la humanidad (y fundado por Elon Musk), ha publicado imágenes de una mano robótica que está entrenada para resolver un Cubo de Rubik.
- La mano robótica en realidad tiene 15 años, pero fue entrenada usando nuevas redes neuronales que completaron el rompecabezas en simulación.
- Saltar de la simulación al mundo real requería un nuevo tipo de entrenamiento llamado aleatorización automática de dominios.
Primero vinieron los robots para nuestros trabajos, luego vinieron para nuestros juegos de rompecabezas. OpenAI ha lanzado imágenes de una mano robótica que puede resolver un cubo de Rubik el 60 por ciento del tiempo. Se acabo.
La organización, fundada por Elon Musk en 2015 para "colaborar libremente" con otros investigadores al hacer públicas todas sus patentes y otros trabajos, decidió trabajar en este robot, llamado Dactyl, porque los investigadores creen que entrenar una mano robótica para hacer algo Esto es un paso complicado para lograr robots de uso general.
"Construir robots que sean tan versátiles como los humanos sigue siendo un gran desafío de la robótica", escriben los científicos en un trabajo de investigación publicado esta semana. "Si bien existen sistemas de robótica humanoide, usarlos en el mundo real para tareas complejas sigue siendo un desafío desalentador".
De la simulación al mundo real
Uno de los grandes desafíos en robótica es enseñar a las máquinas a agarrar y sostener objetos, y mucho menos completar tareas complicadas como maniobrar alrededor de un cubo de Rubik con una mano. La manipulación con las manos a menudo se considera como una de las fronteras finales para introducir robots en el hogar o en entornos médicos debido al alto nivel de destreza requerido para mover los dígitos individuales de una mano robótica.
Sin embargo, ese desafío fue exactamente lo que OpenAI intentó completar. Al utilizar lo que los investigadores han acuñado como "aleatorización automática de dominios", podrían crear infinitamente entornos más desafiantes en la simulación, burlándose de algunas de las bolas curvas que la vida real ciertamente arrojaría al robot.
Ese tipo de entrenamiento permitió a los investigadores entrenar al robot en la simulación, al tiempo que encontraron el éxito en el mundo físico. Después de todo, factores como la fricción, la elasticidad y la dinámica son difíciles de modelar con precisión.
"Esto nos libera de tener un modelo preciso del mundo real y permite que la transferencia de redes neuronales aprendidas en la simulación se aplique al mundo real", escriben los investigadores.
La aleatorización automática del dominio comienza con un solo entorno no aleatorio donde la red neuronal está entrenada para resolver un Cubo de Rubik. Luego, a medida que la red neuronal mejora en su tarea con el tiempo, alcanzando un umbral de rendimiento, la cantidad de aleatorización aumenta automáticamente para dificultar la tarea. De esa manera, la red neuronal debe aprender a encontrar soluciones generales para entornos aleatorios, aprendiendo hasta que se alcance nuevamente el umbral de rendimiento. El proceso se repite.
Para probar aún más la robustez del robot, los investigadores intentaron tropezarlo con varios objetos extraños, incluida una cabeza de ciervo de plástico, una manta e incluso guantes de goma. Pero el robot aún perseveró.
Alcanzando Robots Generalizados
Claro, puede comparar el robot de resolución de cubos de Rubik con robots generalizados que pueden completar una serie de tareas en el mundo real, adaptándose adecuadamente a los nuevos desafíos que su red neuronal no se ha enseñado directamente a enfrentar en la simulación. Solo hay un problema: los investigadores ya han denunciado esa relación como inherentemente problemática.
"Puede haber una impresión de que hay una teoría o sistema unificado, y ahora OpenAI solo lo aplica a esta tarea y esa tarea", dijo Dmitry Berenson, un robotista de la Universidad de Michigan que se especializa en manipulación de máquinas. Revisión de tecnología. "Pero eso no es lo que está sucediendo en absoluto. Estas son tareas aisladas. Hay componentes comunes, pero también hay una gran cantidad de ingeniería aquí para que cada nueva tarea funcione ".
"Es por eso que me siento un poco incómodo con las afirmaciones sobre esto que lleva a los robots de uso general", dijo. "Veo esto como un sistema muy específico destinado a una aplicación específica".
El núcleo del problema es el aprendizaje por refuerzo en sí mismo. Esta técnica se usa para entrenar un sistema en una habilidad específica, que puede completar incluso con nuevos obstáculos en los que no ha sido entrenado. Sin embargo, el mundo real plantea innumerables riesgos para un robot de resolución de cubos de Rubik, y mucho menos uno que limpia su cocina o cuida a sus abuelos.