Si bien la agilidad de un robot Spot o Atlas es algo digno de contemplar, hay un mérito especial reservado para robots pequeños y simples que funcionan no como un individuo versátil sino como un grupo adaptable. Estos “tribots” se basan en el modelo de las hormigas, y al igual que ellos, pueden trabajar juntos para superar los obstáculos con el trabajo en equipo.
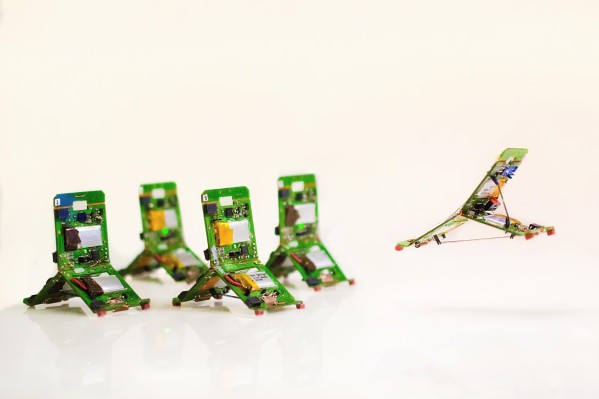
Desarrollados por la EPFL y la Universidad de Osaka, los tribots son pequeños, ligeros y simples, se mueven más como gusanos y no como hormigas, pero pueden lanzarse y avanzar si es necesario. Los propios bots y el sistema que componen se basan en las hormigas trampa-mandíbulas, que alternan entre el rastreo y el salto, y el trabajo (al igual que la mayoría de las otras hormigas) en roles fluidos como explorador, trabajador y líder. Cada robot no es en sí mismo muy inteligente, pero son controlados como un colectivo que despliega sus habilidades de manera inteligente.
En este caso, se podría esperar que un equipo de tribots pase de un extremo de un terreno complejo a otro. Un explorador podría avanzar, detectando obstáculos y transmitiendo sus ubicaciones y dimensiones al resto del equipo. Luego, el líder puede asignar unidades de trabajadores para que intenten empujar los obstáculos. Si eso no funciona, un explorador puede intentar saltar sobre él y, si tiene éxito, puede transmitir su telemetría a los demás para que puedan hacer lo mismo.

¡Vuela, tribot, vuela!
En este punto, todo se hace con bastante lentitud. Notará que en el video, gran parte de la acción ocurre a una velocidad de 16x. Pero la rapidez no es la idea aquí; similar a las creaciones de Squishy Robotics, se trata más de la adaptabilidad y la simplicidad de la implementación.
Los pequeños bots pesan solo 10 gramos cada uno y son fáciles de producir en masa, ya que son básicamente PCB con algunos bits mecánicos y puntos de agarre adjuntos, “un sándwich de metamaterial cuasi bidimensional”, según el documento. Si solo cuestan (digamos) un dólar cada uno, usted podría dejar caer docenas o cientos en un área objetivo y en una hora o dos podrían caracterizarlo, tomar medidas y buscar radiación o puntos calientes de calor, etc.
Si se movieran un poco más rápido, la misma lógica y un diseño modificado podrían hacer que un conjunto de robots emergiera en una cocina o comedor para encontrar y recolectar migajas o planchas en su lugar. (Ray Bradbury los llamó “ratones eléctricos” o algo así como “Vendrán lluvias suaves”, una de mis historias favoritas de él. Siempre estoy atento a ellos).
Los robots basados en enjambres tienen la ventaja de no fallar catastróficamente cuando algo sale mal: cuando un robot falla, el colectivo persiste, y puede reemplazarse tan fácilmente como una parte.
“Dado que se pueden fabricar y desplegar en grandes cantidades, tener algunas” bajas “no afectaría el éxito de la misión”, señaló la EPFL Jamie Paik, quien co-diseñó los robots. “Con su inteligencia colectiva única, nuestros pequeños robots pueden demostrar una mejor adaptabilidad a entornos desconocidos; por lo tanto, para ciertas misiones, superarían a los robots más grandes y más poderosos “.
¿Plantea la pregunta, de hecho, de si los sub-robots en sí mismos constituyen una especie de uber-robot? (Esta es más una cuestión filosófica, planteada primero en el caso de los Constructicons y Devastator. Los Transformers se adelantaron a su tiempo de muchas maneras).
Los robots aún están en forma de prototipo, pero aun así, constituyen un gran avance sobre otros sistemas de robot de tipo “colectivo”. El equipo documenta sus avances en un artículo publicado en la revista Nature.