La investigación en el campo del aprendizaje automático y la IA, ahora una tecnología clave en prácticamente todas las industrias y empresas, es demasiado voluminosa para que alguien la lea en su totalidad. Esta columna, Perceptron (anteriormente Deep Science), tiene como objetivo recopilar algunos de los descubrimientos y artículos recientes más relevantes, particularmente en inteligencia artificial, entre otros, y explicar por qué son importantes.
Esta semana en AI, los investigadores descubierto un método que podría permitir a los adversarios rastrear los movimientos de los robots controlados de forma remota, incluso cuando las comunicaciones de los robots están encriptadas de extremo a extremo. Los coautores, que provienen de la Universidad de Strathclyde en Glasgow, dijeron que su estudio muestra que adoptar las mejores prácticas de ciberseguridad no es suficiente para detener los ataques a los sistemas autónomos.
El control remoto, o teleoperación, promete permitir a los operadores guiar uno o varios robots desde lejos en una variedad de entornos. Startups como Pollen Robotics, Beam y Tortoise han demostrado la utilidad de los robots teleoperados en supermercados, hospitales y oficinas. Otras empresas desarrollan robots controlados a distancia para tareas como la desactivación de bombas o la inspección de sitios con mucha radiación.
Pero la nueva investigación muestra que la teleoperación, incluso cuando se supone que es “segura”, es riesgosa en su susceptibilidad a la vigilancia. Los coautores de Strathclyde describen en un artículo el uso de una red neuronal para inferir información sobre qué operaciones está llevando a cabo un robot controlado de forma remota. Después de recolectar muestras de TLS-protegieron el tráfico entre el robot y el controlador y al realizar un análisis, descubrieron que la red neuronal podía identificar movimientos aproximadamente el 60% del tiempo y también reconstruir “flujos de trabajo de almacenamiento” (por ejemplo, recoger paquetes) con “alta precisión”.
Créditos de imagen: Sha et al.
Alarmante de una manera menos inmediata es una nueva estudiar de investigadores de Google y la Universidad de Michigan que exploraron las relaciones de las personas con los sistemas impulsados por IA en países con legislación débil y “optimismo nacional” para la IA. El trabajo encuestó a usuarios de plataformas de préstamos instantáneos con sede en India y “estresados financieramente” que se dirigen a prestatarios con crédito determinado por la IA de modelado de riesgo. Según los coautores, los usuarios experimentaron sentimientos de endeudamiento por la “bendición” de los préstamos instantáneos y la obligación de aceptar términos estrictos, compartir datos confidenciales en exceso y pagar tarifas altas.
Los investigadores argumentan que los hallazgos ilustran la necesidad de una mayor “responsabilidad algorítmica”, particularmente en lo que respecta a la IA en los servicios financieros. “Argumentamos que la rendición de cuentas está determinada por las relaciones de poder de la plataforma y el usuario e instamos a los legisladores a tener precaución al adoptar un enfoque puramente técnico para fomentar la responsabilidad algorítmica”, escribieron. “En cambio, pedimos intervenciones situadas que mejoren la agencia de los usuarios, permitan una transparencia significativa, reconfiguren las relaciones diseñador-usuario y provoquen una reflexión crítica en los profesionales hacia una responsabilidad más amplia”.
en menos adusto investigar, un equipo de científicos de la TU Dortmund University, la Rhine-Waal University y la LIACS Universiteit Leiden en los Países Bajos desarrollaron un algoritmo que afirman que puede “resolver” el juego Rocket League. Motivado por encontrar una forma menos intensiva desde el punto de vista computacional para crear una IA para el juego, el equipo aprovechó lo que ellos llaman una técnica de transferencia de “sim a sim”, que entrenó al sistema de IA para realizar tareas en el juego como portería y remate dentro de un equipo despojado. -abajo, versión simplificada de Rocket League. (Rocket League básicamente se parece al fútbol sala, excepto que los autos en lugar de los jugadores humanos en equipos de tres).
Créditos de imagen: Pleines et al.
No fue perfecto, pero el sistema de juego Rocket League de los investigadores logró salvar casi todos los tiros que se hicieron cuando era portero. Cuando estaba a la ofensiva, el sistema anotó con éxito el 75 % de los tiros, un récord respetable.
Los simuladores de movimientos humanos también avanzan a buen ritmo. El trabajo de Meta sobre el seguimiento y la simulación de extremidades humanas tiene aplicaciones obvias en sus productos AR y VR, pero también podría usarse de manera más amplia en robótica e IA incorporada. La investigación que salió esta semana recibió un consejo de la gorra de nada menos que Mark Zuckerberg.
Esqueleto y grupos musculares simulados en Myosuite. Créditos de imagen: Meta
MyoSuite simula músculos y esqueletos en 3D a medida que interactúan con los objetos y con ellos mismos; esto es importante para que los agentes aprendan a sujetar y manipular correctamente las cosas sin aplastarlas ni dejarlas caer, y también en un mundo virtual proporciona agarres e interacciones realistas. Supuestamente se ejecuta miles de veces más rápido en ciertas tareas, lo que permite que los procesos de aprendizaje simulados sucedan mucho más rápido. “Vamos a abrir estos modelos para que los investigadores puedan usarlos para avanzar más en el campo”, dice Zuck. ¡Y lo hicieron!
Muchas de estas simulaciones están basadas en agentes u objetos, pero este proyecto del MIT analiza la simulación de un sistema general de agentes independientes: automóviles autónomos. La idea es que si tiene una buena cantidad de automóviles en la carretera, puede hacer que trabajen juntos no solo para evitar colisiones, sino también para evitar paradas innecesarias en los semáforos.
Si miras de cerca, solo los autos delanteros se detienen realmente. Créditos de imagen: MIT
Como puede ver en la animación de arriba, un conjunto de vehículos autónomos que se comunican usando protocolos V2V básicamente pueden evitar que todos los autos, excepto los que están al frente, se detengan al disminuir la velocidad progresivamente uno detrás del otro, pero no tanto como para que realmente se detengan. Este tipo de comportamiento hipermiling puede parecer que no ahorra mucha gasolina o batería, pero cuando lo amplía a miles o millones de automóviles, sí marca la diferencia, y también puede ser un viaje más cómodo. Sin embargo, buena suerte haciendo que todos se acerquen a la intersección perfectamente espaciados así.
Suiza se está mirando a sí misma detenidamente, utilizando tecnología de escaneo 3D. El país está haciendo un mapa enorme utilizando vehículos aéreos no tripulados equipados con lidar y otras herramientas, pero hay un problema: el movimiento del dron (deliberado y accidental) introduce un error en el mapa de puntos que debe corregirse manualmente. ¿No es un problema si solo está escaneando un solo edificio sino un país entero?
Afortunadamente, un equipo de EPFL está integrando un modelo ML directamente en la pila de captura lidar que puede determinar cuándo un objeto ha sido escaneado varias veces desde diferentes ángulos y usar esa información para alinear el mapa de puntos en una sola malla cohesiva. este artículo de noticias no es particularmente esclarecedor, pero el documento que lo acompaña entra en más detalles. Un ejemplo del mapa resultante se puede ver en el video de arriba.
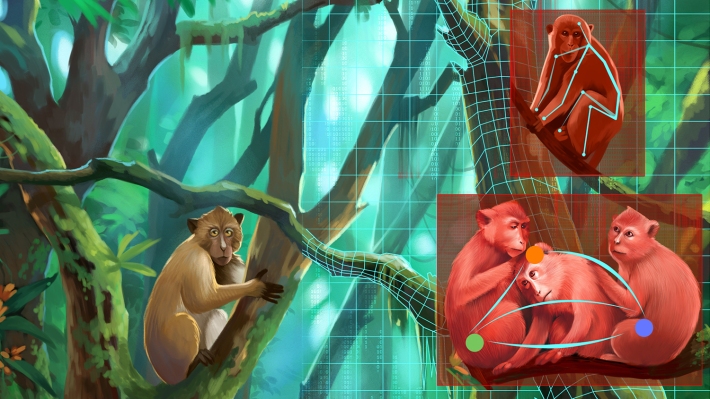
Por último, en noticias de IA inesperadas pero muy agradables, un equipo de la Universidad de Zúrich ha diseñó un algoritmo para rastrear el comportamiento animal para que los zoólogos no tengan que revisar semanas de imágenes para encontrar los dos ejemplos de bailes de cortejo. Es una colaboración con el Zoológico de Zúrich, lo que tiene sentido si consideramos lo siguiente: “Nuestro método puede reconocer incluso cambios de comportamiento sutiles o raros en animales de investigación, como signos de estrés, ansiedad o incomodidad”, dijo el director del laboratorio, Mehmet Fatih Yanik.
Por lo tanto, la herramienta podría usarse para aprender y rastrear comportamientos en cautiverio, para el bienestar de los animales cautivos en zoológicos y también para otras formas de estudios con animales. Podrían usar menos animales de estudio y obtener más información en menos tiempo, con menos trabajo de los estudiantes de posgrado estudiando detenidamente los archivos de video hasta altas horas de la noche. Suena como una situación de ganar-ganar-ganar-ganar para mí.
Créditos de imagen: Ella Marushenko / ETH Zúrich
Además, me encanta la ilustración.