Las criaturas de las profundidades viven en un mundo muy diferente, uno letal para nosotros. Pero nuestro mundo también es letal para ellos, todos los bordes afilados y movimientos rápidos. Si queremos atrapar y aprender sobre los habitantes de las profundidades de cuerpo blando, nuestras máquinas también deben ser suaves, y de eso se trata esta investigación de robótica de Harvard.
La recolección de muestras del océano profundo es una tarea difícil de hacer de manera segura: aunque estos animales están sujetos a presiones y temperaturas mucho más allá de lo que cualquier criatura de la superficie podría manejar, no obstante son muy fáciles de dañar por el manejo. Los métodos existentes para recolectarlos para el estudio a menudo implican succionarlos en pequeños recipientes que se mantienen presurizados y llevados a la superficie. Pero sería bueno poder arrebatar una criatura intrigante e inspeccionarla in vivo, ¿no?
Con ese fin, los investigadores del Instituto Wyss de Harvard he estado trabajando en formas más simples y seguras de atrapar a estas criaturas temporalmente, dejándolas ir segundos o minutos más tarde una vez que el recolector haya obtenido algunas buenas imágenes o (no sé) muestreó algo de moco.
Hace poco más de un año, crearon una “Pokebola submarina”, una especie de forma geodésica suave que podría cerrarse alrededor de algo como una gelatina o un pez a la deriva. Pero incluso con ese tipo de método, todavía existe la posibilidad de que pueda aplastarse durante el cierre.
Así que continuaron su trabajo, persiguiendo en cambio “apéndices parecidos a fideos” que, cuando no se activan, son tan flexibles e inofensivos como los espaguetis cocidos, o más bien fettuccine considerando su forma.
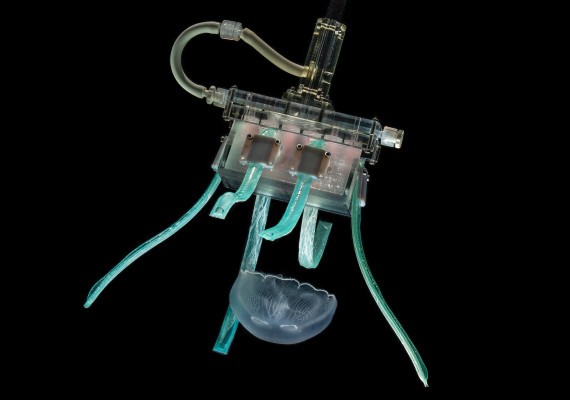
Cada “dedo” está hecho de una “matriz de silicona elástica pero resistente”, y en su interior hay pequeñas fibras que permanecen flojas cuando no están en uso, pero que pueden endurecerse con una pequeña cantidad de presión hidráulica. Esto hace que todo el dedo se doble en una dirección específica, en este caso hacia adentro al mismo tiempo que los demás, colocando lo que esté dentro de su alcance en la suave “palma” impresa en 3D. El agarre es lo suficientemente suave como para que no dañar a la criatura, pero lo suficientemente firme como para que no pueda simplemente escabullirse.

Sinatra y col. / Ciencia Robótica
En ese momento, los investigadores son libres de hacer lo que quieran, aunque presumiblemente después de tomar tanta precaución para atrapar al animal ileso, no harán nada demasiado duro con él.
Existen pocas limitaciones en el tamaño o la longitud de los dedos, lo que significa que se pueden personalizar para diferentes operaciones. El dispositivo que ves en la foto fue hecho para ser efectivo en la captura de jaleas comunes, pero todo podría escalarse fácilmente para manejar animales más grandes o más pequeños.
Por supuesto, todo se puede conectar a un sumergible, pero es lo suficientemente pequeño y simple como para que también se pueda convertir en un dispositivo portátil para muestreo manual, en caso de que lo prefiera un investigador determinado. Armaron un prototipo y “demostraron el uso de esta pinza suave de mano para realizar con éxito el agarre suave de tres especies de medusas canónicas”.
Espero que esto signifique menos gelatinas trituradas en nuestros océanos, y tal vez algún día puedas alquilar un capturador de este tipo mientras buceas y tener la oportunidad de examinar de cerca la frágil vida marina sin tener que agarrarla con las manos (no recomendado).
El trabajo de los investigadores fue publicado hoy en la revista Science Robotics.