Los robots blandos inspirados biológicamente tienen mucho sentido en muchos escenarios diferentes, pero como con cualquier clase de tecnología, tienen sus limitaciones. Entre otras cosas, estas estructuras dóciles pueden tener dificultades para moverse a la misma velocidad que sus contrapartes más rígidas. Para ayudar a acelerar la natación, un equipo de investigadores de la Universidad Estatal de Carolina del Norte convertido en otro poco de inspiración de la naturaleza: la mantarraya.
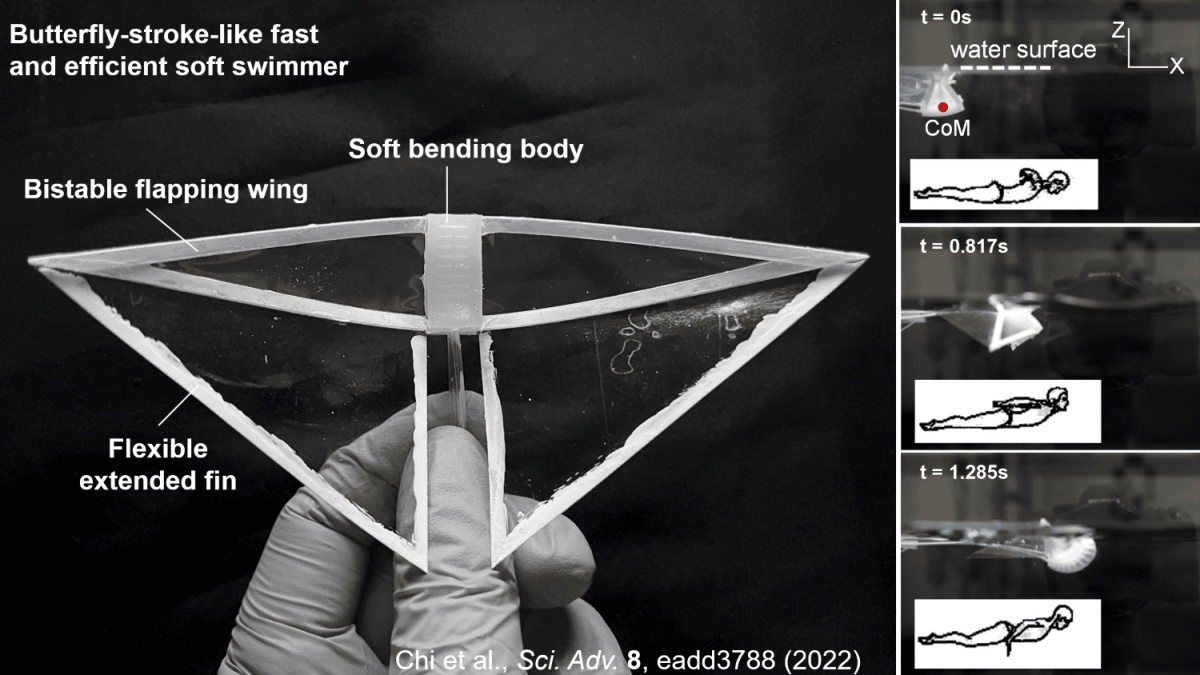
Mirar hacia el pez tiene sentido. Estos primos de los tiburones vuelan efectivamente a través del agua gracias a sus enormes aletas pectorales en forma de alas. En última instancia, sin embargo, los investigadores les dieron el nombre de un animal completamente diferente. Los “robots mariposa” son considerados así por su parecido con los brazos de los humanos que realizan el estilo mariposa. [see: the above image].
Se construyeron dos versiones del robot. El primero fue diseñado específicamente para la velocidad, con la capacidad de mover 3,74 longitudes de cuerpo por segundo, un gran aumento con respecto a los robots blandos que luchan por mover una sola longitud de cuerpo en ese tiempo. Un segundo, diseñado para un mayor control, se mueve alrededor de 1,7 cuerpos por segundo. En el primer caso, el diseño hace que girar sea un problema. Con el segundo, el equipo agregó un segundo tren de transmisión para girar el robot batiendo una sola ala a la vez.
“Hasta la fecha, los robots blandos nadadores no han podido nadar más rápido que la longitud de un cuerpo por segundo, pero los animales marinos, como las mantarrayas, pueden nadar mucho más rápido y de manera mucho más eficiente”, dijo el coautor del artículo, Jie. Yin, dice en un comunicado. “Queríamos basarnos en la biomecánica de estos animales para ver si podíamos desarrollar robots blandos más rápidos y con mayor eficiencia energética. Los prototipos que hemos desarrollado funcionan excepcionalmente bien”.
El cuerpo se dobla hacia arriba y hacia abajo usando un sistema de tubo de aire neumático, que a su vez dobla las alas/aletas, impulsando el sistema hacia adelante. Yin agrega: “La mayoría de los intentos anteriores de desarrollar robots con aleteo se han centrado en el uso de motores para proporcionar energía directamente a las alas. Nuestro enfoque utiliza alas biestables que se impulsan pasivamente al mover el cuerpo central. Esta es una distinción importante, porque permite un diseño simplificado, lo que reduce el peso”.
El equipo dice que está trabajando en una versión autónoma y sin ataduras del robot mariposa de natación suave.