Algunos desafíos de robótica tienen aplicaciones claras de inmediato. Otros están más enfocados en ayudar a los sistemas a resolver desafíos más amplios. Enseñando pequeños robots para jugar al fútbol uno contra el otro encaja firmemente en la última categoría.
los autores de un papel nuevo que detalla el uso del aprendizaje por refuerzo para enseñar al robot Mini Cheetah del MIT a tocar la nota del portero,
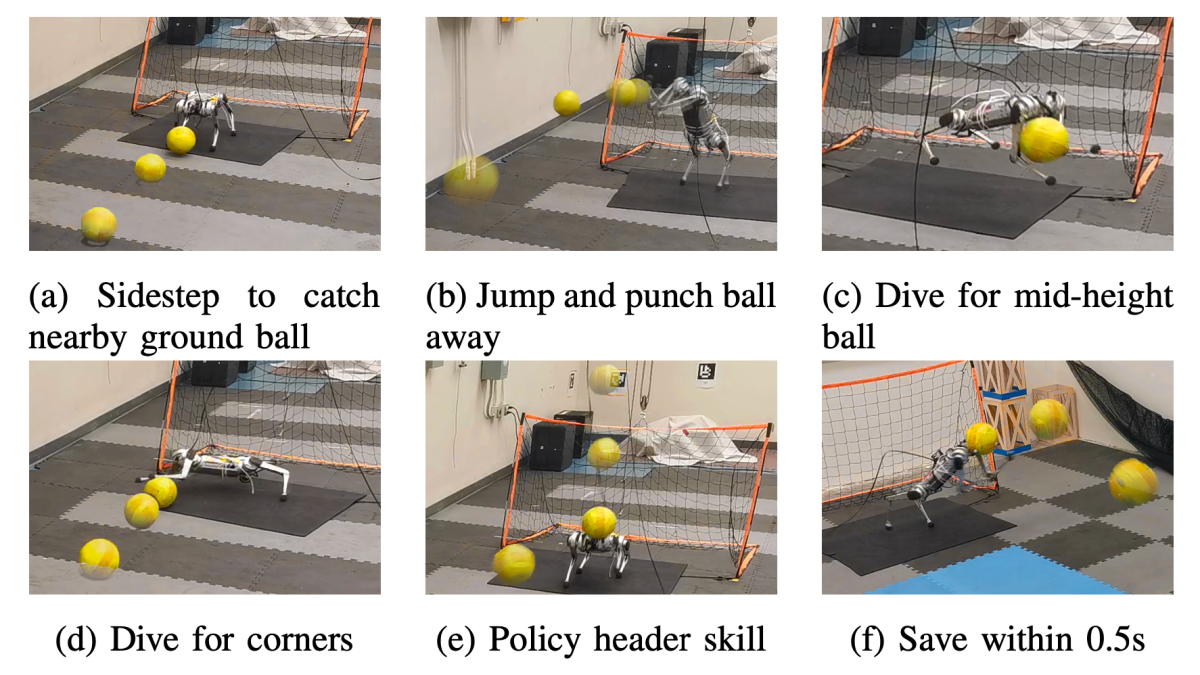
La portería de fútbol con cuadrúpedos es un problema desafiante que combina una locomoción altamente dinámica con una manipulación precisa y rápida de objetos no prensiles (balones). El robot necesita reaccionar e interceptar una bola potencialmente voladora utilizando maniobras de locomoción dinámicas en un período de tiempo muy corto, generalmente menos de un segundo. En este documento, proponemos abordar este problema utilizando un marco de RL sin modelo jerárquico.
Créditos de imagen: Robótica híbrida
Efectivamente, el robot necesita bloquear un proyectil y maniobrar para bloquear la pelota en menos de un segundo. Los parámetros del robot se definen en un emulador, y el Mini Cheetah se basa en un trío de movimientos: esquivar, zambullirse y saltar, para bloquear la pelota en su camino hacia la meta al determinar su trayectoria mientras está en movimiento.
Para probar la eficacia del programa, el equipo enfrentó el sistema contra un componente humano y un compañero Mini Cheetah. En particular, el mismo marco básico utilizado para defender la portería puede aplicarse al ataque. Los autores del artículo señalan: “En este trabajo, nos centramos únicamente en la tarea de porteros, pero el marco propuesto puede extenderse a otros escenarios, como patear balones de fútbol con múltiples habilidades”.